





码垛机器人腰关节电机及减速器选型伺服控制系统硬件电路设计
时间:2017-09-11
阅读:8952

码垛机器人腰关节电机及减速器选型伺服控制系统硬件电路设计
第三章伺服控制系统硬件电路设计
交流伺服电动机和伺服控制器共同构成了交流伺服系统,其中伺服控制器起着至关重要的作用,它的性能好坏会对电机运行状态产生直接影响。与传统模拟控制器相比较而言,传统模拟器虽然具备很多优点然而其自身也存在些许无可避免的劣势,比如设计麻烦,一旦设计完成就不能再进行修改和扩充,并且无法实现复杂的计算,也就无法实现现代控制理论指导下的控制算法。综上所述,本设计采用了基于现代的矢量控制思想全数字控制器,以取得更好的电流幅值及相位控制。
3.1伺服控制系统硬件结构
为了从硬件设计上实现对交流伺服系统的控制,则系统的硬件分为以下三个部分,如图3.1所示。
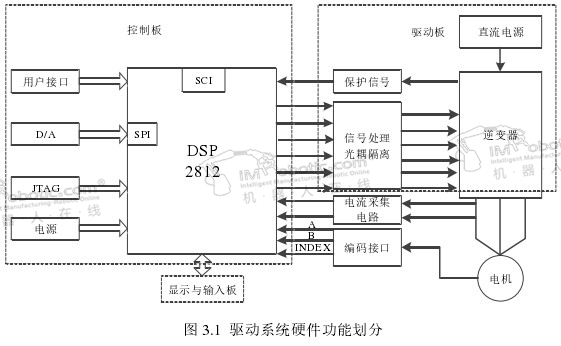
第一部分为控制板,包括供电电源电路、PWMDAC模块,QEP模块以及与驱动板连接的外部接口。第二部分为驱动板,包括主回路、检测电路,IGBT驱动电路,与控制板连接的外部借口。第三部分为显示与按键输入板,实现了相关数据的实时刷新以及系统目标值的输入,显示刷新包括实时转速显示与占空比输入的显示。
为保证本设计的正常运行,系统使用的是单相交流电,并最终转换为+15VIGBT驱动电压、+5 V电源和DSP使用的3.3V, 1.8V电源供电。因需要连接仿真器对所开发的程序进行烧写、实时调试及数据抓取,需要外扩静态存储器,设计与仿真器连接的JTAG接口及外围所必须的EV和ADC等接口和电路;逆变电路选取IGBT作为开关元件,多电源供电,通过驱动IGBT逆变电路上下桥臂的通断产生与转子呈直角的矢量驱动电压;转子位置的获取通过与电机相连的光电编码器,实时采集电机的位置信号,为矢量控制系统提供了转子位置信息。码垛机器人

码垛机器人,码垛机器人腰关节电机驱动系统的设计
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









