





图解法计算码垛机器人的工作空间(上)
时间:2017-09-25
阅读:9873

2.5.2图解法计算码垛机器人工作空间
通过以上分析,码垛机器人末端执行机构与驱动机构的运动关系己经明确,所以在进行机器人工作空间分析计算时可以采用固定一个方向的驱动机构位置的办法,通过几何图形计算的方式得出另一个方向的工作空间,最后分段绘出码垛机器人工作空间的边界曲线。
考虑到码垛机器人连杆承载能力以及实际工作范围的要求,同时也为了防止各连杆之间发生干涉,在计算码垛机器人工作空间时,需要限定平行四边形连杆最小内角为30度。由于码垛机器人在水平方向上运动行程的设计要求为600mm,根据连杆机构的运动分析,可以确定水平方向丝杠导轨滑块的两个极限位置的坐标可以设定为A(-300,0),B(-100,0)。
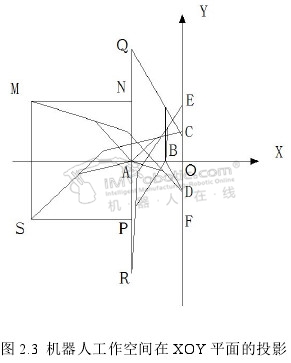
首先,固定A点不动,单独移动竖直方向上的驱动模块,当连杆Li, La成30度夹角时,即位置到达C点和D点时,竖直驱动模块达到理论极限位置,此时末端执行机构的轨迹为MS。然后,固定B点不动,单独移动竖直驱动模块,当连杆L1, L2成30度时,即位置到达E点和F点时,竖直驱动模块达到理论极限位置,此时末端执行机构的轨迹为QR 码垛机器人

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









