





笛卡尔坐标型码垛机器人制系统硬件的选型
时间:2017-09-26
阅读:7781

笛卡尔坐标型码垛机器人制系统硬件的选型
4.3.1可编程控制器的选型
可编程控制器以其可靠性高、功能强大、使用方便等特点在现代工业控制领域得到了广泛的应用。目前世界上生产可编程控制器的厂家有200多个,比较知名的有美国的罗克韦尔,德国的西门子,日本的三菱、欧姆龙,以及我国的浙大中控等网。
本课题码垛机器人控制系统对控制器的要求主要有:强大的I}}处理能力,高速脉冲输出端口,与人机界面信息交互的能力等。
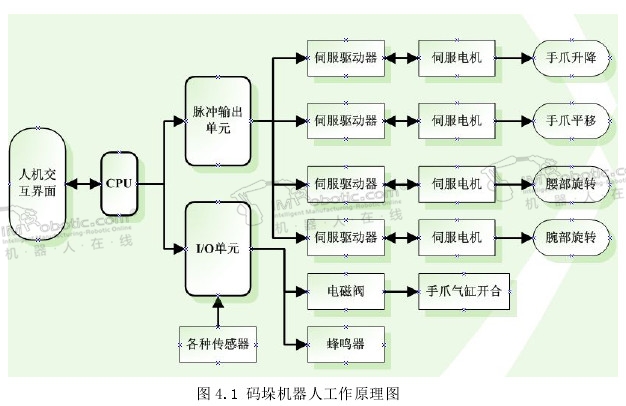
通过对码垛机器人的控制原理分析可知,在控制系统中需要用到的数字量输入信号共25个,包括启动、停止、急停按钮各一个,检测气缸活塞位置的磁性传感器4个,极限位置检测接近传感器8个,原点位置检测接近传感器4个,料到位检测光电开关一个,落料检测光电开关5个。数字量输出信号共9个,包括电磁阀2个,蜂鸣器1个,正常工作及停止指示灯2个,伺服电机工作信号4个。
在控制系统中,包含了四组伺服驱动机构,因此需要控制器具有至少四轴高速脉冲输出口。
现代工业控制中,通用的人机界面就是触摸屏。目前市场上主流的PLC基本都能与触摸屏匹配使用,因此这一点不用担心网。
结合以上对可编程控制器要求的分析,选取欧姆龙CP1H型PLC作为本课题中码垛机器人的主控制器,如图4.2所示。
欧姆龙CP1H型PLC是一款用于实现高速处理、高功能的程序一体化型PLC,主要性能参数有:
(1)CPU单元本体,内置数字量输入24点,数字量输出16点;
(2)CPU单元本体,拥有四组高速计数器,四组脉冲输出端口;
(3)可通过CPM1 A系列的扩展I/O单元,CP1H整体可以达到320点的输入输出。
(4)通过安装选件板,可进行RS232通信或RS485通信。
(5)通过扩展CJ系列高功能单元,可扩展向上位、下位的通信功能。
由以上功能参数可以看出,该型号的可编程控制器主机的输入输出端口不足以满足控制系统的要求,因此需要添加一个I/O扩展单元CPM1 A-8ED。 码垛机器人

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









