





基于CAD导航的焊接路径规划方法
时间:2017-10-09
阅读:10340

.jpg)
第四章基于CAD导航的焊接路径规划方法
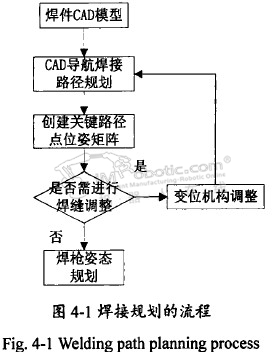
焊接机器人离线编程中直接关系到焊接加工效率和质量的因素是焊接作业路径、焊缝的姿态和焊枪的姿态,为满足良好焊接质量需求焊接加工前需对上述三个因素进行规划,其具体规划流程如图4-1所示。本章重点研究基于c}导航实现焊接路径规划的方法一一焊缝关键路径点位姿矩阵表示法,并对变位机构的运动学模型和焊枪姿态调整方法进行介绍。
4.1三维CAD模型简介
当前CAD软件系统常用体素构造法和边界表示法来创建三维实体模型
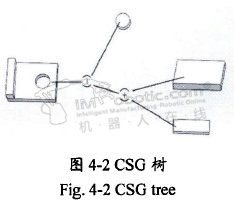
体素构造法(Constructive Solid Geometry)简称CSG法是指运用基本体素和体素之间的和、并、差运算来表示实体的一种方法,如图4-2表示。它是运用二叉树的形式来阐述实体的组建过程,二叉树的节点为体素,连线为对体素的布尔运算操作。基本体素元素包括长方体、圆柱、球体、锥体等。
边界表示法(B-rep)就是用体、面、环、边、顶点等物体的边界信息来表示一个物体的模型。它包括几何信息和拓扑信息。几何信息是指三维模型的大小、尺寸和几何形状等,拓扑信息是指实体中点、边、面之间的相互关系。图4-3说明了边界表示法的基本原理。

因此,基于CSG法和B-rep法创建的CAD实体模型不仅包含了模型的全部几何信息、而且记录了全部点、线、面、体的信息。CAD导航的焊接路径规划其本质就是:利用CAD模型的几何拓扑信息快速的创建焊接作业路径、提取出焊缝关键路径点的位姿信息。 焊接机器人

焊接机器人,CAD导航的焊接机器人离线编程系统研究
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









