





两步变身老鸟,手把手教你提升ABB机器人编程技巧!(二)

1、双机器人与变位机编程
第一:如下图,双机器人+变位机系统,使用Multimove,(即一台控制器,一个示教器,三个运动任务)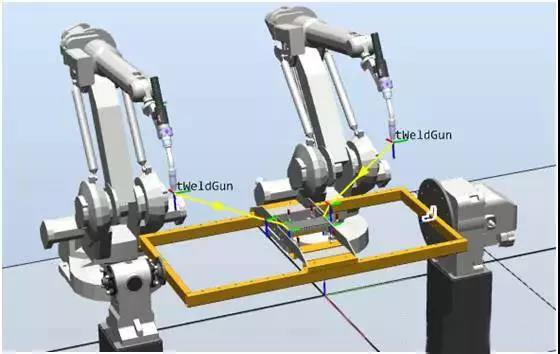
第二:机器人需要有multimove选项 604-1或者604-2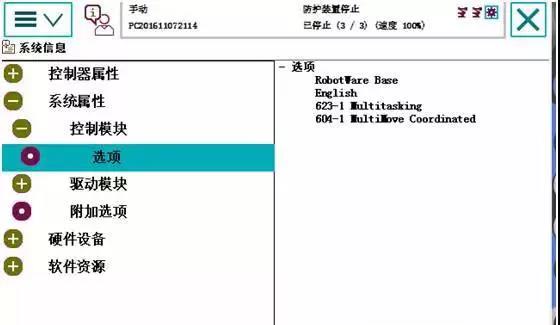
604-1能够实现多机器人在一个坐标系协同运动,604-2只能半联动,即机器人同时开始,过程中各走各的。
第三:多任务生产窗口如下图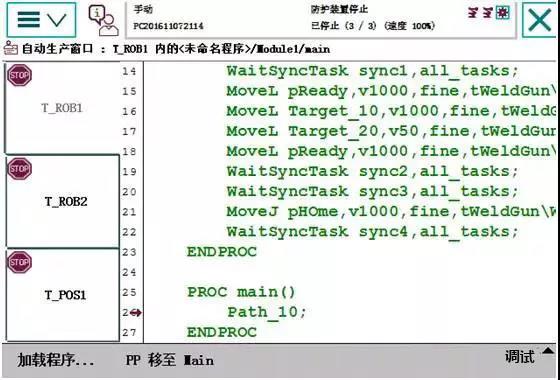
第四:运动过程如下:
A)两台机器人在Home位置,变位机从上料位置转到焊接位置
B)两台机器人走到准备焊接位置
C)1#机器人开始焊接第一段,完成后走到ready_1位置
D)1#焊接完成后,2#机器人焊接,完成后走到ready_2位置
E) 两台机器人一起回各自Home
F) 变位机转到上料位置
第五:要实现多机器人(变位机)间简单通讯,需要在程序数据里各自的任务建立task数据,如下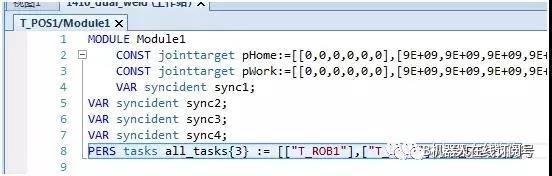
▲变位机任务
※注意数据必须是PERS,数组内容为三个任务的名称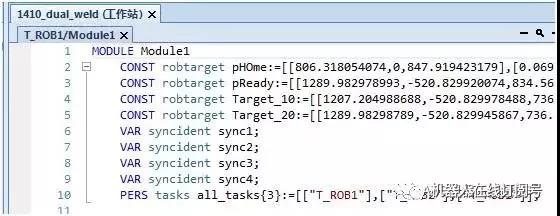
▲1#机器人任务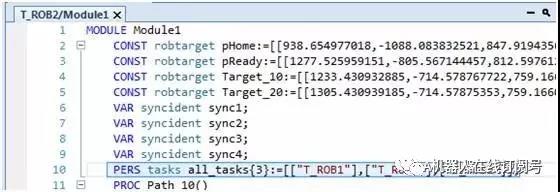
▲2#机器人任务
第六:多机器人间要相互等待,需要添加数据Sync,如下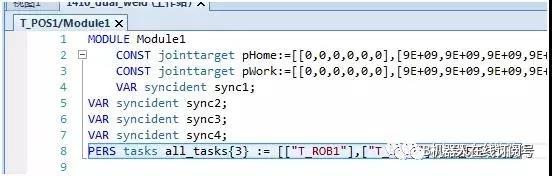
▲变位机任务里的4个syncident数据syn1,syn2,syn3,syn4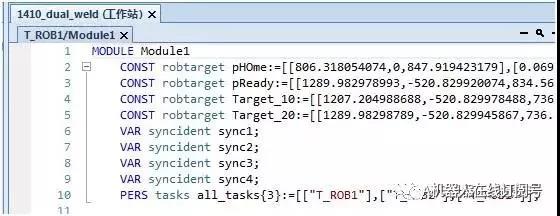
▲1#机器人任务的4个syncident数据syn1,syn2,syn3,syn4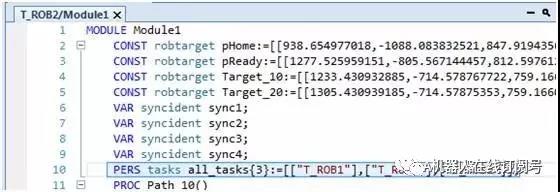
▲2#机器人任务的4个syncident数据syn1,syn2,syn3,syn4
下图为变位机程序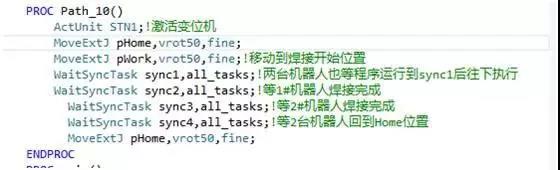
下图为1#机器人程序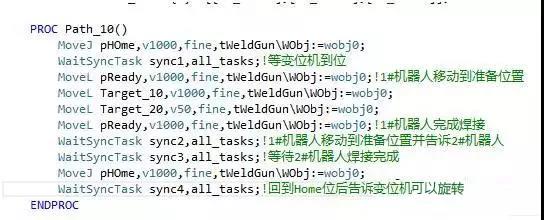
以下为2#机器人程序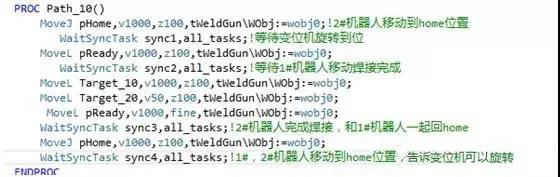
2、ABB机器人创建码垛程序
什么是码垛?
有规律的移动机器人进行抓取及放置。
如何简便码垛程序
设置好工件坐标系,工具,对第一个码垛放置点进行示教,xyz方向的间距和个数可设。
如何创建
第一:创建m_pallet模块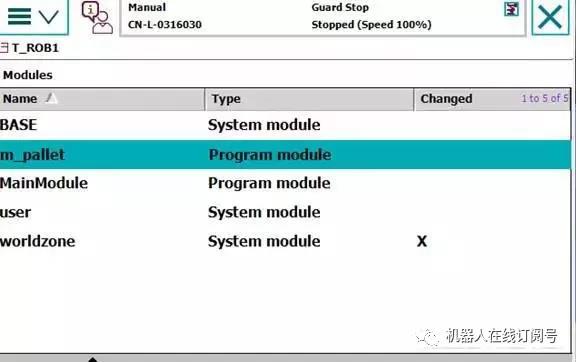
第二:建立两个routine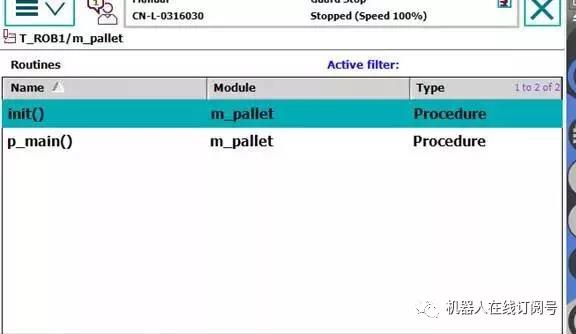
第三:在init 程序里,设置xyz方向个数和各方向间距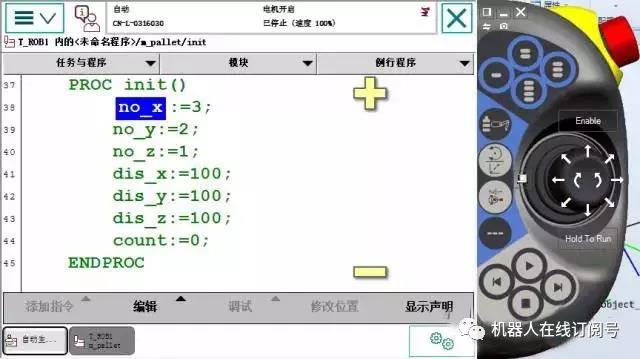
第四:在p_main程序里,创建机器人移动到pHome点,pPick位置(抓取位置),以及第一个放置点pPlace_ini,通过三层for循环,进行码垛。实例程序为先x方向,再y方向,再z方向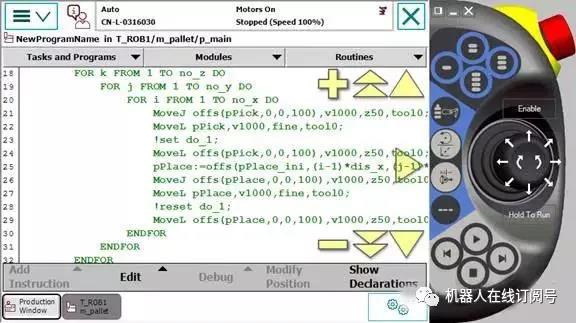
其中偏移如下:
pPlace:=offs(pPlace_ini,(i-1)*dis_x,(j-1)*dis_y,(k-1)*dis_z)。

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-10-24 21:02:58
- 2022-10-14 17:56:03
- 2022-10-23 14:38:05
- 2024-04-11 20:51:04
- 2022-10-16 12:13:17
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









