





【干货】川崎机器人定点修正坐标设置指导
时间:2019-02-18
阅读:45147
原创

本文通过丰富的图片分析,详细的介绍了川崎机器人定点修正坐标的设置。
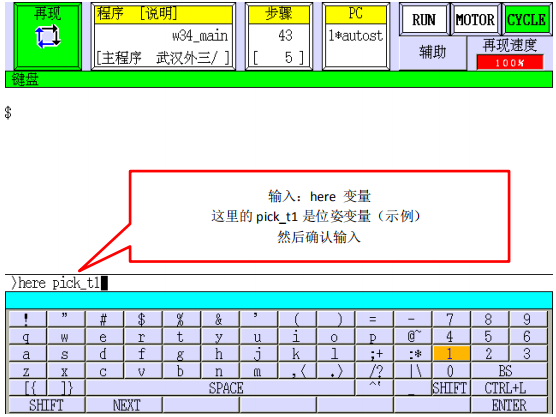
先按示教器上的【菜单】键然后打开[键盘]页

把机器人移动到需要定点的位置上。


在这里说明下:X 的值是机器人左右方向的值(左减右加),Y 的值是机器人前后方向的值(后减前加)。Y 的值是机器人上下方向的值(下减上加),OAT 为角度值,不做过多考虑。
特别说明:第一个逗号的前面是 X 的值,第二个逗号前面是 Y 的值,以此类推,如果不修改某个坐标的值一定要加逗号,不能有空格也不能添 0。

如果输错了,不要紧,重新输入坐标!

最后,坐标确认无误后,确认数据,出现$符号证明坐标修改成功。
关于 PO 指令:po 指令是 point 的缩写,是赋值指令,和 here 的用法是一样的,只是 po 指令不需要移动机器人到目标的位置,只需要根据原有位置信息进行加减就可以了。如果你是第一次修正坐标或者定点,建议用你个里面没有的位姿变量进行测试,一旦改变内部存储的位置数据,可能会出现意想不到的状况发生。
技术干货

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









