





【干货】关于运动轴的知识内容分析——工业机器人(下)

随着社会进步、科技发展,工业机器人的应用也越来越普遍。上一篇推文介绍了工业机器人运动轴的命名、坐标系的确定原则,本文就详细介绍一些工业机器人常用坐标系,以期对工业机器人的应用起到一定的参考。
1、基坐标系( BaseCoordinate System),又称为机座坐标系,位于机器人基座。如图 1 所示,它是最便于机器人从一个位置移动到另一个位置的坐标系。基坐标系在机器人基座中有相应的零点,这使固定安装机器人的移动具有可预测性。在正常配置的机器人系统中,工人可通过控制杆进行该坐标系的移动。
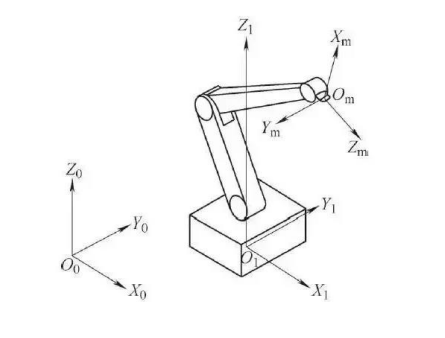
图 1 坐标系示例
(2)世界坐标系(WorldCoordinate System),又称为大地坐标系或绝对坐标系。如果机器人安装在地面, 在基坐标系下示教编程很容易,但当机器人吊装时,机器人末端移动直观性差,因而示教编程较为困难。另外,如果两台或多台机器人共同协作时,例如,一台安装于地面,另一台倒置,倒置机器人的基坐标系也将上下颠倒( 见图2)。当分别在两台机器人的基坐标系 A 、B 中进行运动控制时,很难预测相互协作运动的情况。
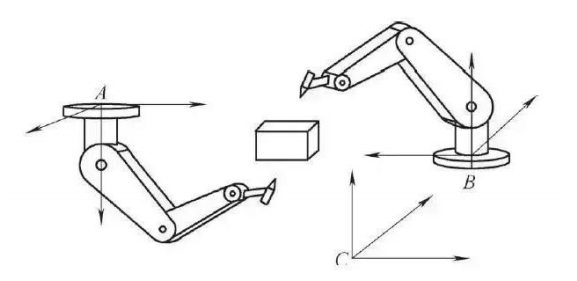
图 2 世界坐标系
此时,可以定义一个共同的世界坐标系 C 取而代之。若无特殊说明,单台机器人世界坐标系和基坐标系是重合的。
(3) 用户坐标系(UserCoordinate System),机器人可以和不同的工作台或夹具配合工作, 在每个工作台上建立一个用户坐标系。机器人大部分采用示教编程的方式,步骤繁琐,对于相同工件,若放置在不同工作台进行操作,不必重新编程,只需相应地变换到当前用户坐标系下。用户坐标系在基坐标系或者世界坐标系下建立。
(4)工件坐标系(ObjectCoordinate System)与工件相关,通常最适于对机器人进行编图 2 世界坐标系程。工件坐标系对应工件,它定义工件相对于大地坐标系(或其他坐标系)的位置。工件坐标系拥有特定附加属性,主要用于简化编程。他拥有两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关) 。机器人可以拥有若干工件坐标系, 表示不同工件,或者表示同一工件在不同位置的若干状态。对机器人进行编程就是在工件坐标系中创建目标和路径,重新定位工作站中的工件时,只需更改工件坐标系的位置,所有路径将随之更新。允许操作以外轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动。
(5) 置换坐标系(Displacement CoordinateSystem)又称为位移坐标系,有时需要对同一工件、同一段轨迹在不同工位上加工,为了避免每次重新编程,可以定义一个置换坐标系。置换坐标系基于工件坐标系定义。如图 3 所示,当置换坐标系被激活后,程序中的所有点都将被置换。
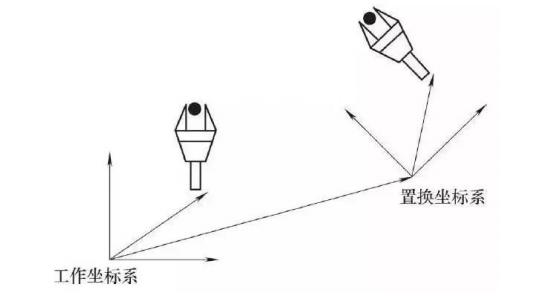
图 3 置换坐标系
(6) 腕坐标系(WristCoordinate System)和工具坐标系都是用来定义工具方向的。在简单应用中,腕坐标系可以定义为工具坐标系,两者重合。腕坐标系的 Z 轴和机器人的第 6 根轴重合,如图 4 所示,坐标系原点位于末端法兰盘中心,X 轴方向与图 3 置换坐标系图 4 腕坐标系法兰盘上标识孔的方向相同或相反,Z 轴垂直向外,Y 轴符合右手法则。
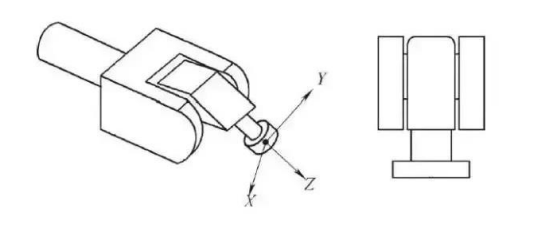
图 4 腕坐标系
(7) 工具坐标系(ToolCoordinate System)安装在末端法兰盘上的工具需要在其中心点(TCP)定义一个工具坐标系,通过坐标系的转换,可以操作机器人在工具坐标系下运动,以方便操作。如果工具磨损或更换,只需重新定义工具坐标系,而不用更改程序。工具坐标系建立在腕坐标系下,即两者之间的相对位置和姿态是确定的。
(8) 关节坐标系(Join tCoordinate System)用来描述机器人每个独立关节的运动,关节类型可能不同( 如移动关节、转动关节等)。若将机器人末端移动到期望位置,在关节坐标系下操作,可以依次驱动各关节运动,从而引导机器人末端到达指定的位置。
最后,希望本文对各位读者在工业机器人运动轴的命名、坐标系的确定原则上有所帮助。

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03 -
安川机器人驱动器如何设置参数?
标签: 安川机器人,驱动器,设置参数 提问:先知 2024-06-13 10:15:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









