





【视觉系统】机器视觉系统详解(下)

本文主要承接上篇继续介绍了机器视觉系统的详细内容,包括主要组成部件与主要工作过程。
五、通信
由于视觉系统经常使用各种现成的组件,这些组件必须能够与其他机器组件相协调,并且能够快速、轻松地连接到其他机器组件。通常,这是通过离散I/O信号或数据来实现的,主要是将这些信号或数据通过串行连接发送至一台设备,以供记录或使用。
离散I/O点可以连接到可编程逻辑控制器(PLC),PLC将使用这些信息来控制工作单元或指示器(如堆栈指示灯),或者直接连接到螺线管,该螺线管可用于触发不合格产品剔除装置。
串行连接式数据通信可以传统的RS-232串行输出或以太网的形式进行。有些系统采用较高层级的工业协议,如以太网/IP,可以连接到显示屏等设备或其他操作界面,提供适用于应用的操作界面,从而方便流程的监控和控制。
大多数机器视觉硬件组件,如光源模块、传感器和处理器,都是以商用现货(COTS)形式供应的。用户可以购买这些商用现货(COTS),将它们组装成机器视觉系统,或者直接购买集成式机器视觉系统,即一台设备中集成了所有部件。
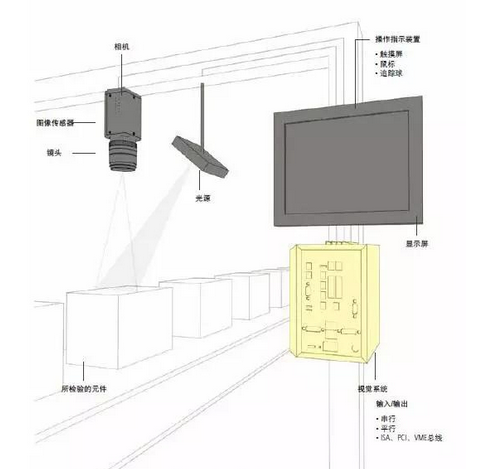
最后,一个完整的机器视觉系统的主要工作过程如下:
1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。
2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。
3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。
4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。
5、另一个启动脉冲打开灯光照明,灯光的开启时间应该与摄像机的曝光时间匹配。
6、摄像机曝光后,正式开始一帧图像的扫描和输出。
7、图像采集部分接收模拟视频信号通过A/D将其数字化,或者是直接接收摄像机数字化后的数字视频数据。
8、图像采集部分将数字图像存放在处理器或计算机的内存中。
9、处理器对图像进行处理、分析、识别,获得测量结果或逻辑控制值。
10、处理结果控制流水线的动作、进行定位、纠正运动的误差等。

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









