




-
目前焊接机器人有哪几种?
提问:冬瓜 | 时间:2022-09-05 19:17:44
标签:焊接机器人
回答者:机器人在线 | 时间:2022-09-06 09:08:17
焊接机器人作为一种自动焊接设备,具有通用性强、工作稳定、焊接效率高的特点。焊接机器人用途不同、驱动方式不同,它的种类也不同,下面我给大家简单介绍一下,目前,焊接机器人有多少种:
一:根据用途不同可分为以下两种
1、弧焊机器人
弧焊机器人广泛应用于通用机械、金属结构等多个行业。
电弧焊机器人是一种柔性焊接系统,包括各种电弧焊辅助装置,而不仅仅是一台以计划的速度和姿态携带焊枪的单机,因此对其性能有特殊要求。焊枪应跟踪工件的焊道运动,并不断填充金属形成焊缝。因此,速度稳定性和轨迹精度是运动过程中的两个重要指标。由于焊枪的姿态对焊缝的质量也有一定的影响,所以希望在跟踪焊道的同时,尽量调整焊枪的姿态范围。其他基本性能要求如下:
●设定焊接条件(电流、电压、速度等):
●摆动功能
●坡口煩充功能;
●焊接异常功能检测;
●焊接传感器的接口功能(起始焊点检测、焊道跟踪)。
2、点焊机器人
在点焊机器人系统中,汽车工业是一个典型的应用领域,在组装每一个车身时,大约60%的焊点都是由机器人完成的。Z初始点焊机器人仅用于加强焊接操作(将焊点添加到已拼接的工件上),然后让机器人完成定位焊接操作,以拼接精度。这样,点焊机器人逐渐需要更完整的操作性能,具体来说有:
●安装面积小,工作空间大;
●快速完成小节距的多点定位;
●定位精度高以确保焊接质量;
●为便于携带内装变压器的焊钳;
●内存容量达,示教简单,节省工时;
●点焊速度与生产线速度相匹配,同时安全可靠性好。
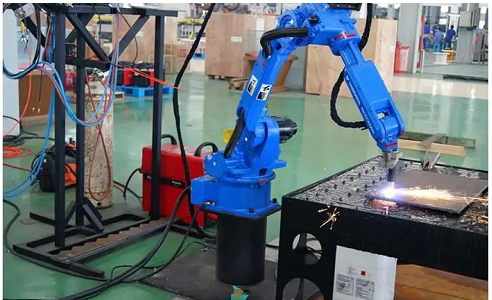
(焊接机器人)
二:根据驱动方式不同可分为以下几种
1、气压驱动
气压驱动的主要优点是气源方便(压缩空气站供应压缩空气)。驱动系统缓冲效果简单,结构简单,成本低,维护方便;主要缺点是功率质量体积大,定位精度低。气压驱动机器人适用于易燃、易爆、多尘的场合。
2、液压驱动
液压驱动系统功率质量比大,驱动稳定,系统固有效率高,快速性好,液压驱动速度调整简单,主要缺点容易漏油,不仅影响工作稳定性和定位精度,污染环境,液压系统需要配备压力源和复杂的管道系统,成本高。液压驱动主要用于输出力大、运动速度低的场合。
3、电气驱动
电动驱动是利用各种电机产生的力或旋转距离,直接或通过减速机构驱动负载,从而获得所需的机器人运动。电气驱动具有控制方便、运动精度高、使用方便、成本低、驱动效率高、不污染环境等优点。电气驱动在Z中很常见,采用Z驱动模式。电驱动可分为步进电机驱动、DC电机驱动、无刷DC电机驱动、交流伺服电机驱动。由于没有电刷,后者具有Z大的转矩质量比,其可靠性极高,几乎不需要任何维护。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

