




-
焊接机器人工作原理是什么?
提问:冬瓜 | 时间:2022-09-09 11:38:17
标签:焊接机器人
回答者:机器人在线 | 时间:2022-09-09 13:19:35
现代机械设备种类繁多,利用率高,功能广泛。例如,焊接机器人在工业化过程中被广泛使用。你知道焊接机器人的工作原理吗?让我给你详细的介绍一下。
焊接机器人是一种从事焊接操作的智能设备,得到了国内企业的认可和广泛应用。在这一发展趋势下,焊接机器人的制造商越来越多。在许多品牌中,焊接机器人也非常不同。现在我们来谈谈焊接机器人的工作原理:
焊接机器人由用户指导机器人,并根据实际任务一步一步地操作。机器人自动记住每个动作的位置、姿势、运动参数、焊接参数等,并自动生成连续执行所有操作的程序。教学完成后,只需给机器人一个启动命令,机器人就会准确地按照教学动作,一步一步地完成所有操作,实际的教学和再现。
焊接机器人分为弧焊机器人和点焊机器人。弧焊机器人的特点是多采用气体保护焊法(MAG,MIG,TIG),晶闸管式、逆变式、波形控制式、脉冲或非脉冲焊接电源均可安装在机器人上进行电弧焊。由于机器人控制柜采用数字控制,焊接电源多为模拟控制,因此需要在焊接电源与控制柜之间增加接口。
点焊机器人的特点是采用综合焊钳,焊接变压器安装在焊钳后面,因此点焊机器人的变压器必须尽可能小。小容量变压器可使用50Hz工频通信,对于容量大的变压器,已经在工业中应用中吧50Hz工频交流变为600~700Hz交流,减少减轻变压器的体积。变压后可直接使用600~700Hz交流电焊,也可进行二次整流,采用直流电焊,焊接参数由定时器调整。
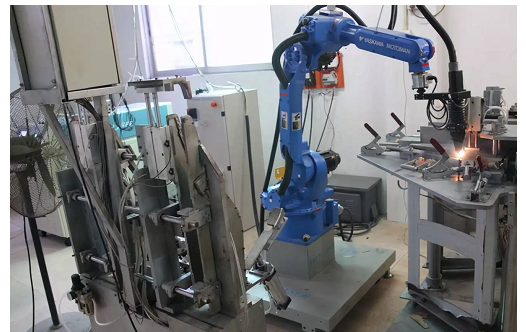
(焊接机器人)
现在,新型定时器已经微机化,所以机器人控制柜可以直接控制定时器,不需要额外的接口。点焊机器人的焊钳采用电动伺服点焊钳。焊钳的开启和关闭由伺服电机驱动,由码盘反馈,使焊钳的开启度可根据实际需要任意选择和预设,电极之间的压力也可以无级调节。
弧焊机器人可应用于所有电弧焊、切割技术和类似的工业方法。最常用的范围是结构钢和铬镍钢的熔融极性气体保护(CO2焊,MAG焊接)、铝和特殊合金熔化极惰性气体保护焊接(MIC焊接)镀镍钢和铝的惰性气体保护焊和埋弧焊。一套完整的电弧焊机器人系统,应包括机器人机械手、焊接装置、控制系统、焊件夹持装置。有两组旋转工作台可以轮流进入机器人的工作范围。
以上是对焊接机器人工作原理的详细介绍。焊接机器人按照教学程序规定的动作、顺序和参数进行焊接。其工艺完全自动化,能耗低、速度高、维护简单、精度高,受到国内企业的高度关注。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

