




-
抛光打磨机器人工作站有哪部分组成?
提问:鹦鹉 | 时间:2022-12-05 22:35:59
标签:抛光,打磨机器人,工作站,组成
回答者:问答小助手 | 时间:2022-12-06 13:18:20
1.1机器人抛光工作站的组成
机器人抛光工作站是一个相对独立的模块化系统,一般由机器人系统(包括学习辅助设备、控制柜、机器人本体)、恒力传感器(包括压力传感器等)、研磨头组件(包括铣削、研磨、铣削、研磨头、抛光头等,以满足粗、精、精加工的要求)、,紧固装置(工件定位支撑装置,如空气仓)、磨削加工装置安全防护装置(包括安全围栏等)、全站控制系统(包括PLC、触摸屏、I/O通信模块等)等。可在计算机控制下进行连续轨迹控制和点控制。抛光打磨机器人工作站有哪部分组成?
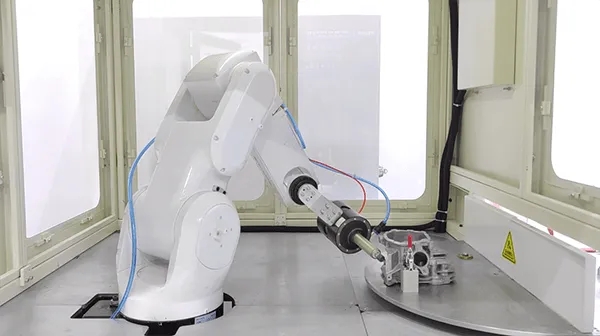
(打磨机器人)
1.2机器人抛光工作流程
不同的抛光机器人分为工具抛光机器人(机器人侧的研磨头)和工件抛光机器人(机器侧的工件)。无论是工件类型还是工具抛光机器人类型。
1.3机器人抛光工作站技术要点
机器人抛光的关键是有效控制研磨头和被加工工件之间的接触强度。
2.机器人兼容运动控制
在学术界,当机器人受到外部环境的约束时,运动控制和力/力矩调节策略被称为机器人运动的相应控制。机器人对环境做出反应的能力称为灵活性。说白了,机器人可以快速适应环境变化以满足加工要求。目前有两种类型的合规检查,即主动合规和被动合规。所谓主动顺应是指机器人基于力反馈信息采取某种控制策略,以主动控制机器人与环境之间的力。被动顺应是指使用一些能够吸收或保持机器人与环境通信能力的机械装置,例如由弹簧、消声器等组成的机构,从而使机器人在暴露于环境中时对外力具有一定的自然响应。目前,主要研究方向是主动顺应,而被动顺应是简单而经济的实施。显然,加工精度越高,需要的灵活性就越大。
2.2控制机器人的恒力
在解释了机器人灵活性的概念之后,我们继续研究机器人抛光系统。机器人抛光系统的灵活性反映在研磨头和被加工工件之间接触期间的力调节中。目前,抛光系统中使用主动和被动柔顺方法。主动遵守是一种趋势,但技术门槛在于软件算法的内部设计。目前,从国外进口的连续力传感器仍然必须支持这一方面。根据这一补充解释,所有机器人+应用都与力的控制有关,而运动本身就是力的结果。但在高精度抛光中,这方面更重要,也更难做好。由于机器人抛光是一种曲面运动,不同于其他点对点线性运动,因此机器人编程轨迹很困难。抛光是导致磨头和工件质量损失的加工过程,这意味着在加工过程中必须及时调整和补偿原始相对位置和强度。抛光是一个对圣诞节非常敏感的工作过程。力的大小、方向和角度以及力的长度导致加工效果的差异。对于高精度工件,磨削和抛光必须在位置、强度、速度等方面稳定准确。为了实现这种稳定的恒力。
机器人抛光的发展现状
抛光打磨机器人工作站有哪部分组成?近年来,越来越多的公司开始关注抛光的应用领域。一方面,近年来,越来越多的公司开始关注抛光的应用领域。一方面,这是市场需求,另一方面,它具有一定的技术应用门槛。吃肉对机器人抛光也有好处。总的来说,打磨机器人时仍有一些硬骨头需要咀嚼。例如,早期投资相对较大,客户产品数量较大,产品附加值不应



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

