




-
工业机器人奇异点怎么规避?
提问:努力 | 时间:2022-12-05 11:35:04
标签:工业机器人,奇异点
回答者:问答小助手 | 时间:2022-12-06 13:25:44
道路上的奇怪点一直是制造商和用户头疼的问题,因为当机器人经过这些位置时,了解运动的结果会导致机器人关节的无限速度。回避会对机器人造成损害,甚至造成损失。工业机器人奇异点怎么规避?
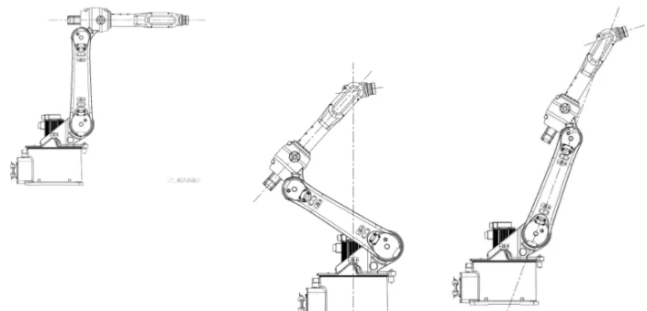
机器人控制系统的制造商通常有两种方法来处理奇怪的点:首先,如果发生超速问题,控制系统会发出错误消息,并要求用户再次教授机器人的方式以避免奇怪的点。显然,这不是一个导致调试效率低下甚至影响生产节奏的理想解决方案;在一些更严重的情况下,用户没有其他路径可供选择,只能调整机器人基地的位置,导致项目成本更高,周期更长。第二,在给出错误提示后,提供手腕插值功能。该方法可以为通过手腕单点的轨迹提供手腕内插函数,确保机器人能够成功通过手腕的单点。这种处理方法需要用户手动编程,这对用户的技术要求很高。为了减少使用和调试实际应用程序客户端的困难,Paitian介绍了基于上述两种处理方法的ARCS管理系统的SFTP功能。激活此功能后,ARCS系统自动检测轨迹是否经过三个单独的点。如果您使用单个点,您可以自动规划轨迹以避开单个点,这样用户就不会感觉到单个点的存在,并真正实现零奇点。该功能可用于对机器人行程有细微要求的场景。
工业机器人奇异点怎么规避?机器人通过三个单独的点手动显示视频运行系统,自动打开SFTP,使慢跑更加流畅。无需担心机器人通过单个点发出警报或轴突然加速(例如,当机器人快速达到极限时)。SFTP功能已打开,但SFTP功能未打开SFTP此功能简化了使用机器人的难度,降低了用户使用机器人的门槛,并提高了调试效率。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

