




ABB-IRB 920T-6-0.55-产品手册
安装和调试期间的安全
机器人系统集成商负责保证机器人系统的安全。
集成商负责按照适用国家及地区标准和规定的安全要求设计和安装机器人系统。要求机器人系统集成商进行风险评估。
布局
对于集成到机器人系统中的机器人,其设计应确保可以在安装、操作、维护和修理期间安全地进入所有空间。
如果机械臂的移动可以从外部控制面板进行控制,那么也必须有紧急停止系统。
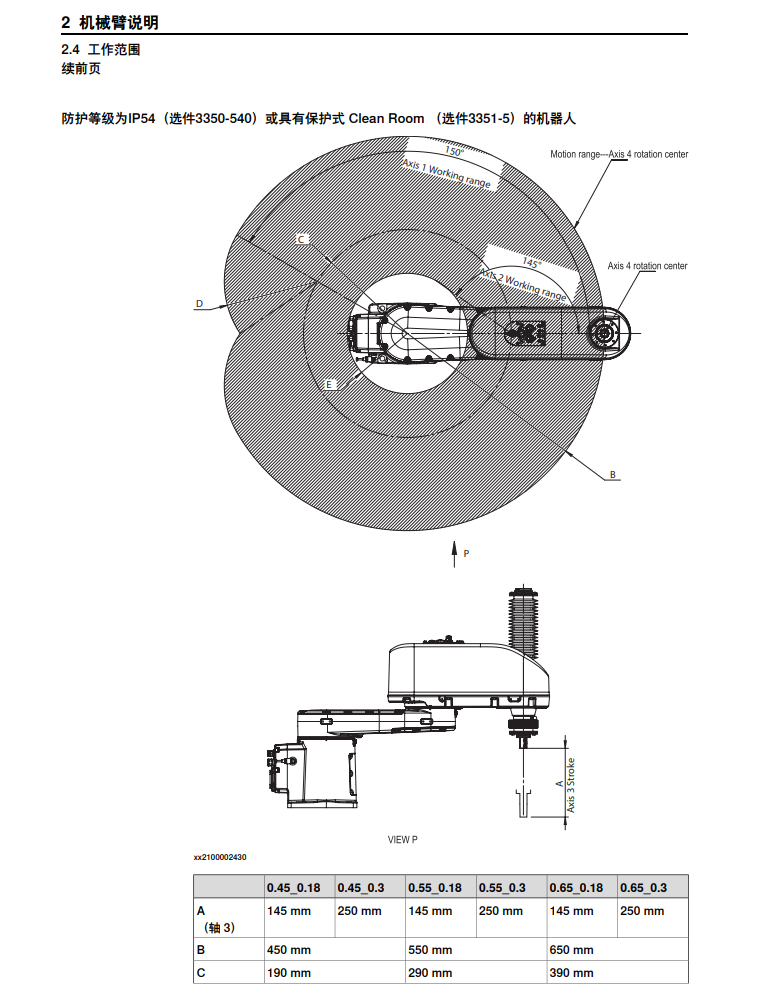
如果机械臂具有机械停止功能,则可以用于减少工作空间。
外围防护,如栅栏,其尺寸应能承受以下受力:
•机械臂力量。
•如果以最大速度下降或释放,机器人所承受的载荷力。
•安装在机器人上的旋转工具或其他装置破损或出现故障可能产生的最大影响。
最大TCP速度和机器人轴的最大速度在各自机械臂产品说明书中机器人运动部分有详细的描述。考虑暴露在危险中的情况,如滑倒、绊倒和摔倒。应考虑机器人操作人员或附近人员工作位置和姿势所致危险。必须考虑机器人发出噪音造成的危害。考虑机器人系统中其他设备的危险,例如,在确定的危险降低到可接受的水平之前,这些防护装置保持有效。
致敏材料
将机器人固定在基座必须按各自的《产品手册》中所述,将机器人正确地固定到其基础/支架上。如果机器人采用空中安装、悬挂或其他并非直接坐落于地面的安装方式,则可能会有更多的风险。
电气安全
为了符合国家规定,必须安装输入电源。必须充分融合机器人的电源布线,必要时,必须从总电源处手动断开电源线。在控制柜内工作时,必须断开总开关和总电源,关闭机器人电源。应考虑锁具和标牌。应固定控制器和机械臂之间的线束,以避免绊倒和磨损。在任何可能的情况下,开关电源或重新启动机器人控制器均应在所有人员处于安全保护区域外时执行。
注意
在机器人发生火灾时,使用二氧化碳(CO2)灭火器!
资料归属









