




【ABB】ABB杯智能技术创新大赛| 给梦想一个机会

上周,ABB杯智能技术创新大赛全面启动,无论是机器人技术的学习者、爱好者、精通者,都有机会参赛并赢取大奖,快让小编带你了解一下大赛详情!

「ABB杯智能技术创新大赛」2019,全新出击!
随着新一轮科技革命和产业变革蓬勃兴起,新的产业生态体系正在孕育形成,各种数字化技术创新和应用层出不穷,深刻改变着这个时代的产业和生活。
由ABB(中国)有限公司主办、中国自动化学会协办的「2019 ABB杯智能技术创新大赛」突破性融合ABB两大年度赛事——ABB大学生创新大赛和ABB杯全国智能技术论文大赛,以 “智能技术· 创领未来” 为主题,旨在发掘和培养更多优秀的智能产业技术人才,推进智能产业理论与实践相结合,解决工程领域的实际问题。
在全新的ABB杯智能技术创新大赛中,广大学生群体和社会在职人员都可以——

通过举办智能技术创新大赛,ABB希望为具有创新意识、钻研精神和创业想法的人才提供一个展示平台,促进参赛选手了解领先技术、获取专家资源、积累实践经验,同时,充分激发青年人才的创新活力,拓宽职业发展领域。
本届大赛选题
智能制造
/工艺中的抓取放置自动化解决方案/
智慧园区
/综合能源运行规划和自动化辅助决策方法/
智能建筑
/数字化楼宇应用方案/
大赛为参赛选手设立“智能制造”、“智慧园区”和“智能建筑”三大选题,选手可从中选择、设计与创作。下面,小编就为大家着重介绍一下智能制造这一选题的考核内容。
智能制造
工艺中的抓取放置自动化解决方案
// 背景 //
在食品饮料、包装、汽车以及3C行业中,大量的产品和零件需要分拣、摆放和堆垛。这项工作动作单一且重复性大,机器人非常适合该类工作。此外,对于一些特定摆放的零件,需对其进行外形、位置或姿态识别后才能让机器人准确定位、抓取和摆放,此时机器人就要与视觉系统配合来完成这项工作。
本课题要求提供一套完整的自动控制解决方案:利用视觉系统识别待处理零件,并为机器人及运动控制系统设计合理路径轨迹和运动规划,以达到最高的工程效率。
// 任务要求 //
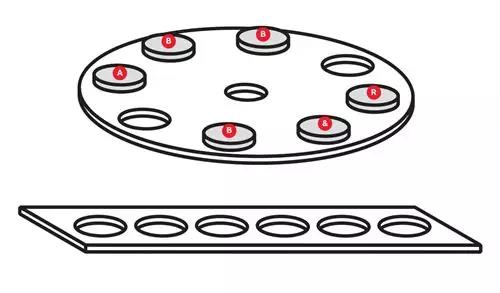
IRB 120机器人的工作区域平面内,放置了一块由步进电机驱动的可旋转圆盘,圆盘上均布了8个圆孔。同时,在圆盘附近固定放置一块矩形平板,并在平板上随机排列了6个标有“ABB”和“B&R”字样的圆片。如下图所示:
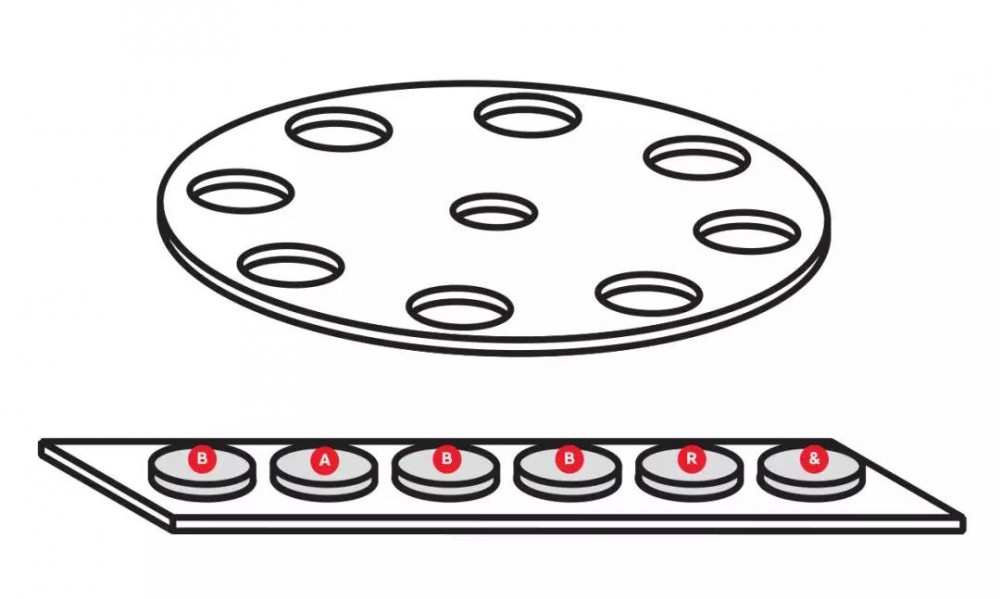
通过自行设计的视觉系统识别圆片上的字母,并通过B&R PLC操作机器人及圆盘的转动,用最快的方式将圆片捡拾至圆盘的孔内,并按照要求顺序排列(如下图为其中一种排列形式)
// 评判标准 //
/方案/大赛将对参赛者提供的机器视觉方案以及机器人和圆盘的运动轨迹规划方案进行横向比较,从先进性、可执行度和可靠性等不同维度评估方案的优劣。
/应用/ 参赛者可在RobotStudio ®及Automation Sutido中提交仿真方案,或者自备设备,并最终在实际设备上实现设计方案。大赛将从摆放成功率、完成速度和完成质量等维度考核。
// 设备说明 //
/主要部件/
1.ABB IRB 120
IRB 120是ABB迄今最小的多用途机器人,仅重25kg,荷重3kg(垂直腕为4kg),工作范围达580mm,精度达0.01毫米(全球最高精度),是具有低投资、高产出优势的经济可靠之选。该款机器人已获得IPA机构“ISO 5级洁净室(100级)”的达标认证,能够在严苛的洁净室环境中充分发挥优势。IRB 120机器人不仅紧凑、灵活、轻量,还有高速工作的优势,工作周期时间改善高达25%,目前广泛应用小件产品组装、打磨、涂胶等工序。

2.B&R X20 Compact-S系列控制器 ,步进电机及运动控制模块
B&R X20 Compact-S系列控制器配备ARM 中央处理器及最高256M运行内存和2GB闪存,可使任务循环周期低至400微秒,并集成多轴运动控制和可视化界面服务于一体。及其紧凑的外形和极高的性价比在机器自动化中广受欢迎。

3.视觉系统
本课题未指定视觉系统。参赛者可自行选择或自行开发视觉处理算法。
4.RobotStudio®
ABB离线编程软件RobotStudio®以ABB VirtualController为基础而开发,与机器人在实际生产中运行的软件完全一致。因此RobotStudio可执行十分逼真的模拟,所编制的机器人程序和配置文件均可直接用于生产现场。

5.Automation Studio
B&R Automation StudioTM软件集成控制系统、可视化、运动控制和安全于一个开发环境。同时借助于B&R IndustrialPhysicsTM和B&R MapleSimTM,两者均可使用CAD数据来创建数字孪生导入到Automation Studio中进行仿真。另外,Automation Studio Target for Simulink软件可以让开发人员在Simulink中创建模型,并在MATLAB/Simulink中自动生成在B&R控制系统中直接运行的程序代码。这些仿真手段在加快机器研发速度上起到了关键作用。
注: 1. Automation Studio软件下载网址:
http://www.br-automa-tion.com/downloads_br_productcatalogue/BRP44400000000000000526738/AS_4.3.4.121_UP_DVD.zip
2. 注册Automation Studio软件步骤:
请点击以下网址:
https://www.br-automation.com/zh/service/automation-studio-licensing/
填写表格信息,点击按钮‘send’,获取注册号:
3. 软件使用相关手册电子版可去网站下载获取,网址如下:
https://brtraining.github.io/
4. 软件使用培训视频可去网站观看,网址如下:
https://v.youku.com/v_show/id_XMTMwMjIwNzk4NA==.html?spm=a2hzp.8253876.0.0&f=23443527
大赛参与方式

长按图片识别二维码进入大赛官网(https://new.abb.com/cn/innovation/ABBCupInnovationContest),报名参与ABB杯智能技术创新大赛。
2019年8月31日 大赛报名及作品提交截止
2019年9月1日—9月30日 作品评选
2019年10月 决赛
丰厚奖品激励
入围选手将在2019年10月举行的决赛答辩环节角逐一、二、三等奖,赢取奖金以及ABB(中国)有限公司招聘直通车“绿卡”,并得到业内资深专家、学者的面对面指导。
ABB 中国“招聘直通车绿卡”。此外,ABB还将在官网及公号设置投票页面,评选“最佳人气团队奖”。

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
六维力传感器如何应用在复杂环境感知中
关键字: 六维力传感器 2025-07-31 -
六维力传感器在人机协作中的应用与价值
关键字: 六维力传感器 2025-07-31 -
精密装配领域的 “隐形校准师”
关键字: 精密装配 2025-07-31 -
工业机器人的柔性感知核心
关键字: 工业机器人 2025-07-31 -
六维力传感器:工业机器人的精准力觉神经
关键字: 六维力传感器 2025-07-31
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2018-08-07 13:59:17
- 2018-08-08 14:58:33
- 2018-02-09 14:04:16
- 2022-03-28 20:22:35
- 2022-05-16 15:26:59
- 2019-07-08 15:18:23
- 2022-11-16 08:30:04
- 2022-10-25 20:48:47
- 2022-10-24 21:02:58
- 2022-10-23 14:38:05
- 2022-10-19 11:11:18
- 2022-11-09 21:32:04
- 2025-07-29
- 2025-07-28
- 2025-07-28
- 2025-07-28
- 2025-07-28
- 2025-07-28
- 2025-07-27
- 2025-07-27
- 2025-07-27
- 2025-07-27









