





工业机器人夹具设计及构思

如今各类制造型企业已陆续实现自动化、智能化。为此,针对工业智能制造中的工业机器人为例,举例说明几种机器人末端夹持机构设计思路
以机器人夹持部举例来说基本要搞清楚几个点:
1)明确你的工作对象,多大多重,将来以多大的加速度运动
2)工作对象有多少种,是否需要换型
3)工作对象是否有明确的位置和位相,正反方向
4)工作对象被夹持后的定位精度需要多少
以上基本情况了解清楚之后
a)选择合适的加持方式
b) 计算加持力是否足够
c) 设计夹爪
首先夹具设计的前提是工艺的确定,因为工艺不确定对夹具的影响很大。甚至可能夹具直接报废重新设计,所以工艺确定为第一步。
确定好工艺后需要清楚的了解加工零件所需要的定位基准。构思过程先从定位开始,因为定位是直接影响零件的加工精度和能否稳定的重要因素之一。定位常用的方式有两孔一面、三面等。
案例介绍一

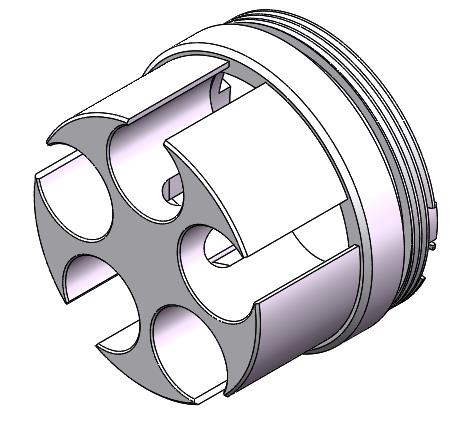
图2 图3
图2、3所示零件CNC车铣加工完以后需要加工侧面的槽。
首先需要考虑的是加工需求:本零件的需求为一个一个加工效率低,迫切需要使用更加效率高的方法来解决一个一个安装在机床上造成机床利用率低下的问题。
其实就是五面需要加工,就只有使用四轴一次加工相对来说效率会比较高。所以设计的时候五面优先考虑在四轴上使用的夹具。
四轴夹具设计有个很棘手的问题就是五面需要加工很大可能对刀具或者夹具产生干涉,那设计的时候就会先将夹具的主体设计出来。
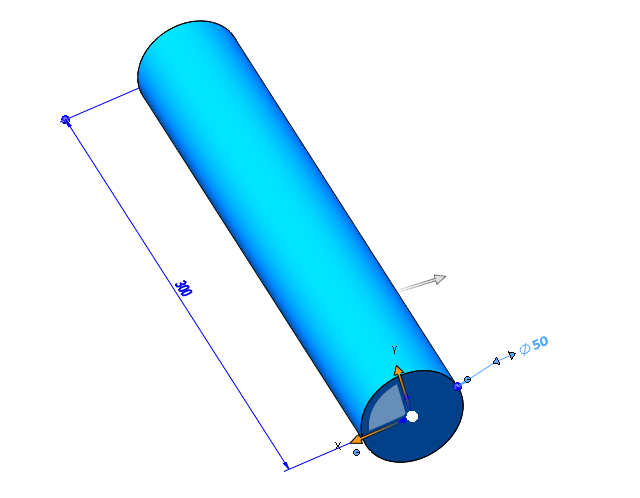
图4
采用一根直径50mm,长300mm的圆棒,圆棒一来基本接近圆形,对各个角度的干涉小,二来方便与四轴的连接。夹具初步结构出来后下一步就是要选用定位基准。定位基准根据工艺控制图用内孔、防呆和定向用蓝色箭头指示位置的槽。
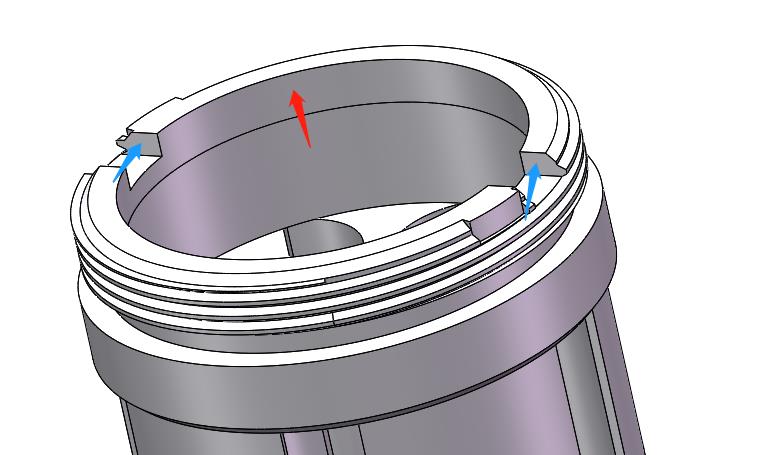
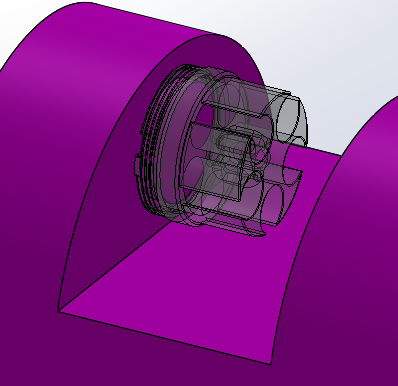
图5 图6
如图6就完成了零件的定位 定向与防呆。
处理好前面的定位等问题后,需要重点考虑如何将零件稳定的固定在夹具上,做一个避空位置处理。
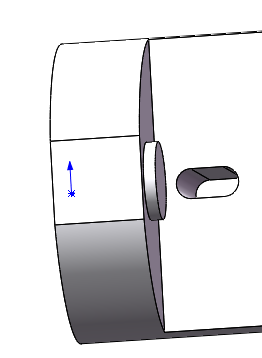
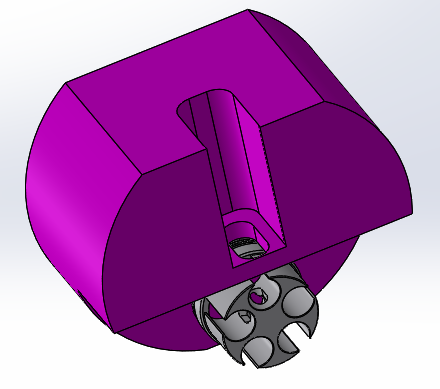
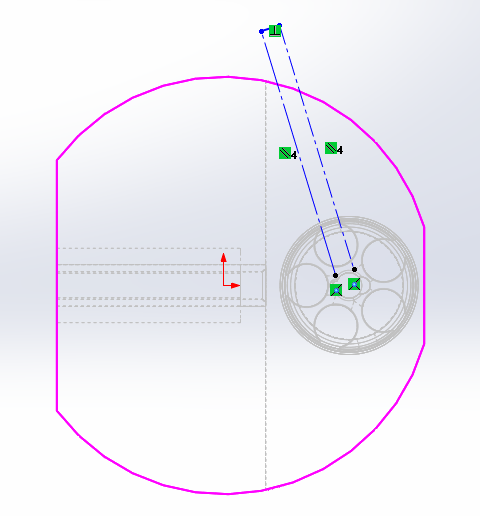
图7 图8 图9
侧面干涩就要调整切下去避空位置的深度,如果是刀具刚性不够可以调整一下结构。
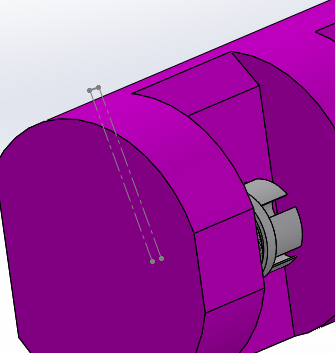
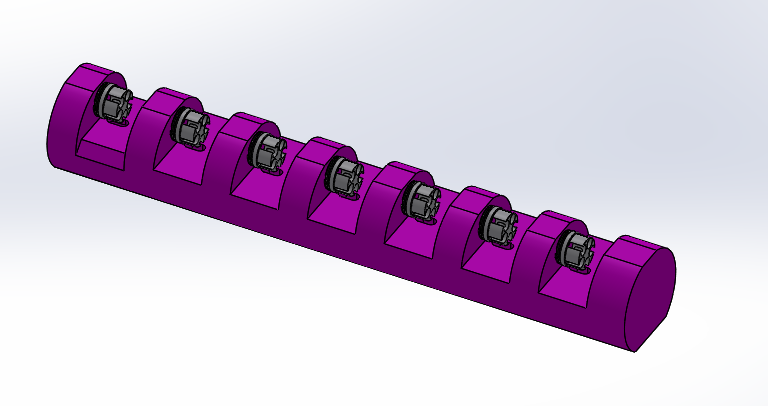
图10 图11
可以加粗刀柄来增加刀具的刚性。 多工位装夹可以解决效率的问题。
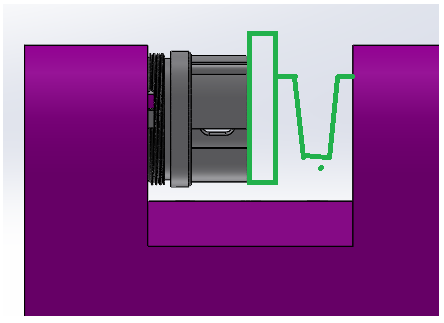
图12
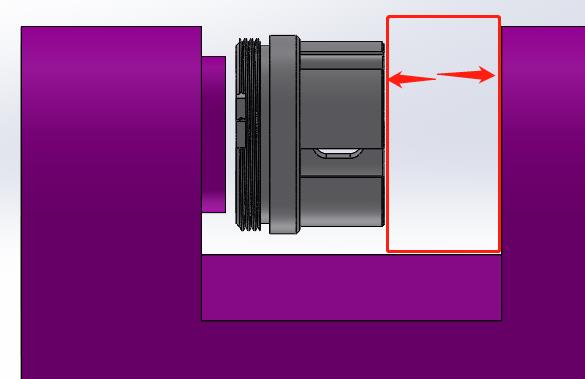
图13
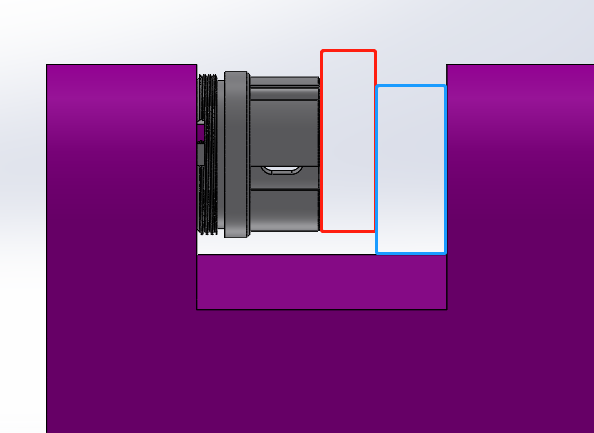
图14
为了节约装夹旋合螺纹的时间我需要只扩张夹中间增加一个垫块,利用锥度将侧面张开。

图15
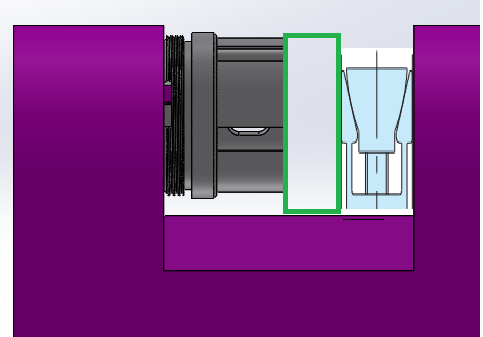
图16
对于工件容易掉,容易错位的问题,采取整体连接的方式。或者如图18所示直接做夹具上翻转。
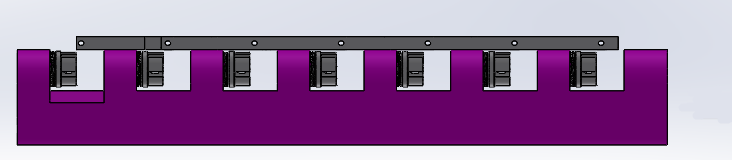
图17
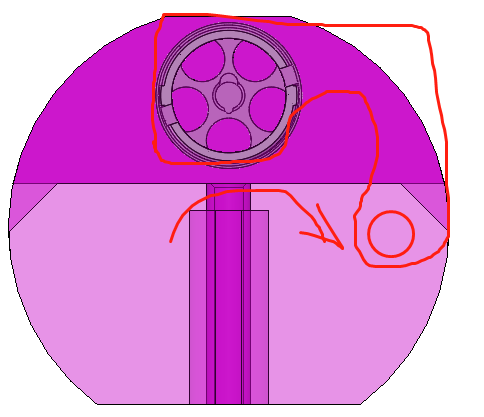
图18
图片及资料来源网络

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 11:02:07
- 2021-08-01 16:40:34
- 2022-12-04 16:53:04
- 2021-03-01 09:30:39
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









