





超实用!S7-1500 运动控制的操作原理及案例分析

PLC学习中组成部分:位置控制、力矩控制、惯量控制。
位置控制模式
S7-1500 的运动控制功能支持轴的定位和移动,是 S7-1500 系列 CPU 众多集成功能中的重要组成部分。运动控制功能支持旋转轴、定位轴、同步轴和外部编码器等工艺对象。根据PLC-Open,具有 PROFIdrive 功能的驱动装置或带模拟量设定值接口的驱动装置将通过标准运动控制指令控制。轴控制面板以及全面的在线和诊断功能有助于轻松完成驱动装置的调试和优化工作。
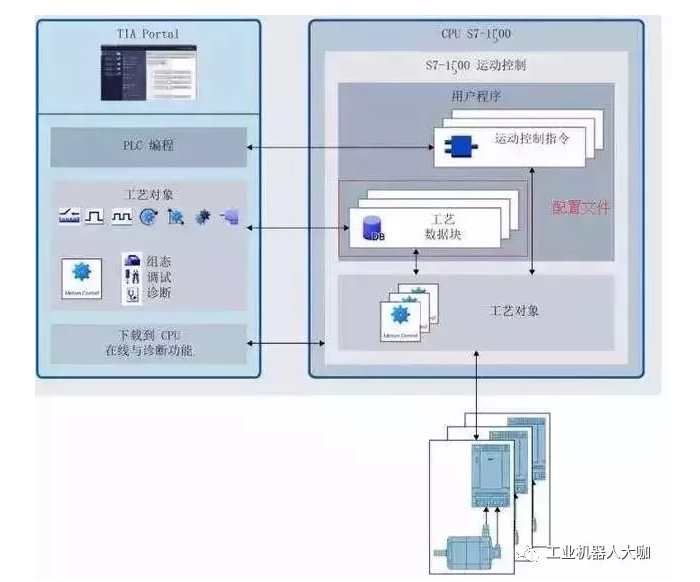
一、S7-1500 运动控制的操作原理
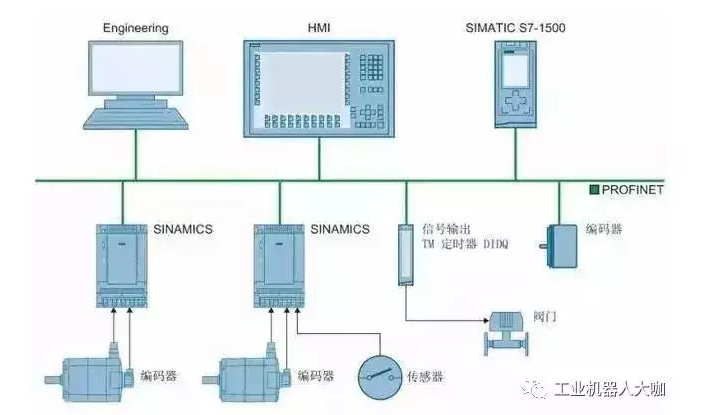
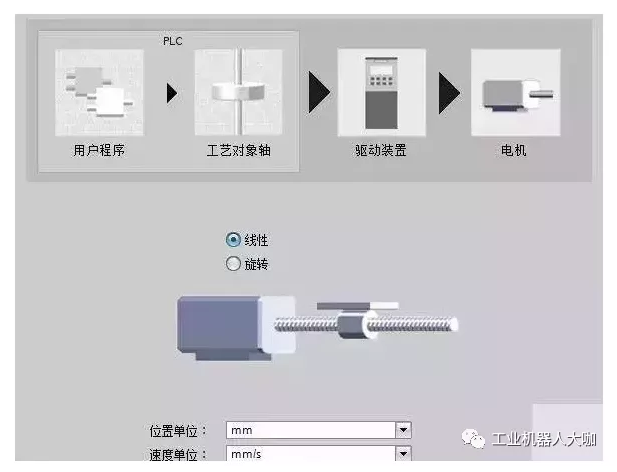
运动控制系统
S7-1500 Motion Control 支持轴的控制定位和移动,是各个 CPU S7-1500 和CPU S7-1500SP 的重要组成部分。S7-1500T Technology CPU 具备增强型功能。运动控制功能支持以下工艺对象:
● 速度轴● 定位轴● 同步轴● 外部编码器● 测量输入● 输出凸轮● 凸轮轨迹● 凸轮 (S7-1500T)
根据 PLCopen,具有 PROFIdrive功能的驱动装置和带模拟量设定值接口的驱
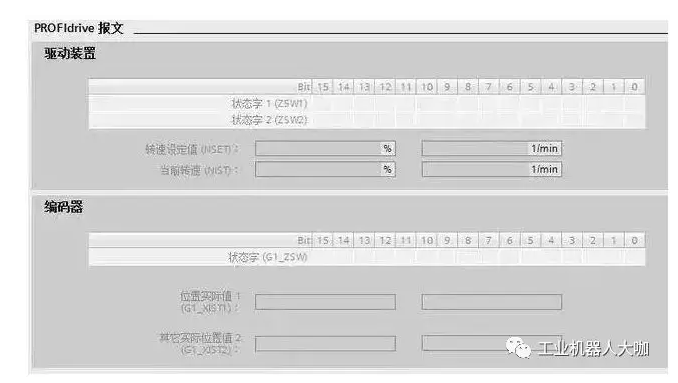
PROFI drive功能简介
【PROFIdrive】 是由 PNO(PROFIBUS 用户组织)在 PROFIBUS DP 和 PROFINET IO
中为速控和位控驱动装置指定的配置文件。
PROFIdrive定义图
二、控制案例分析
2.1 S7-1500系列PLC+变频器+编码器组成位置控制系统
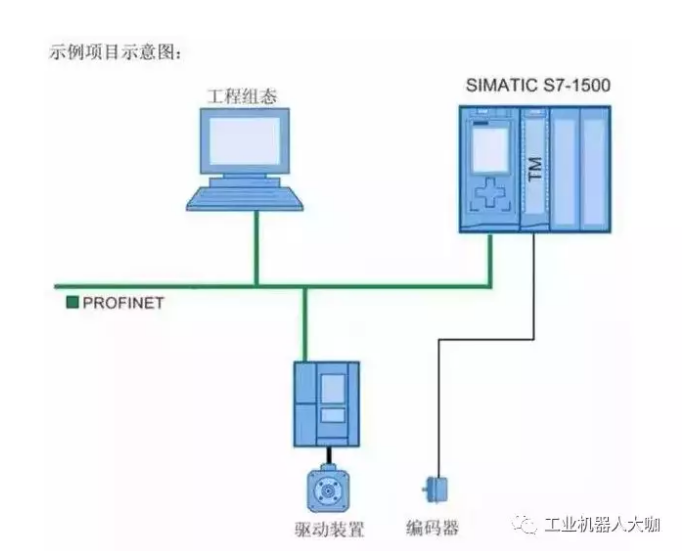
系统搭建示意图
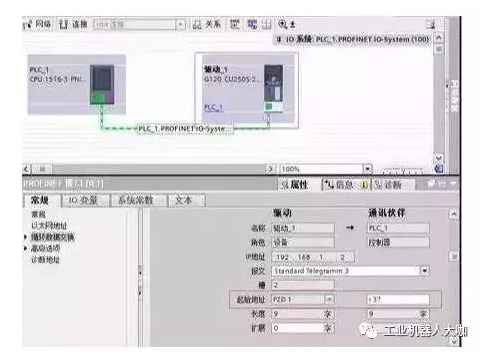
本文中的实例项目使用 CPU1516-3PN/DP 通过 PN 通讯控制 G120 变频器,通过安装在电机后面的编码器连接到工艺模块 TM Count24V 作为位置反馈。

轴定位功能图
2.2 系统硬件组态
1.硬件组成
CPU型号:1516-3 PN/DP 订货号:6ES7 516-3AN00-0AB0 FW V1.6
TM技术模块:2x24V 订货号:6ES7 550-1AA00-0AB0 FW V1.1
G120变频器:CU250-2S 订货号:6SL3 246-0BA22-1FA0 FW V4.6
组态软件:STEP 7 TIA Portal 6ES7 822-1AA03-0YA5 V13 Upd4
SIMATIC Startdrive 6SL3 072-4DA02-0XG0 V13 Upd1
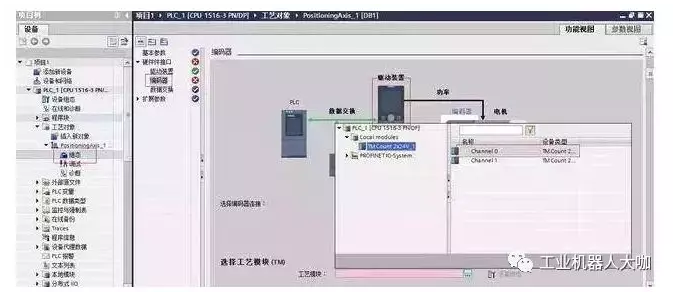
2.硬件组态
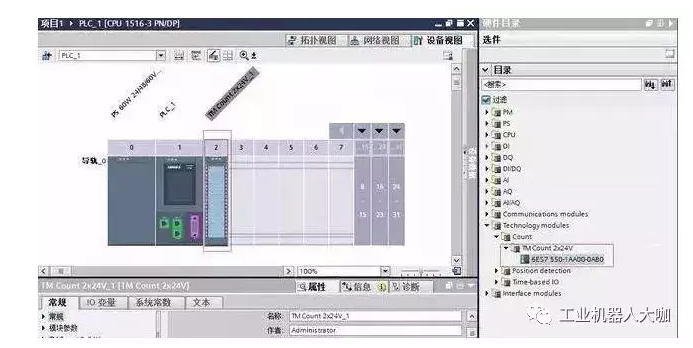
组态1
组态&参数
变频器参数设置
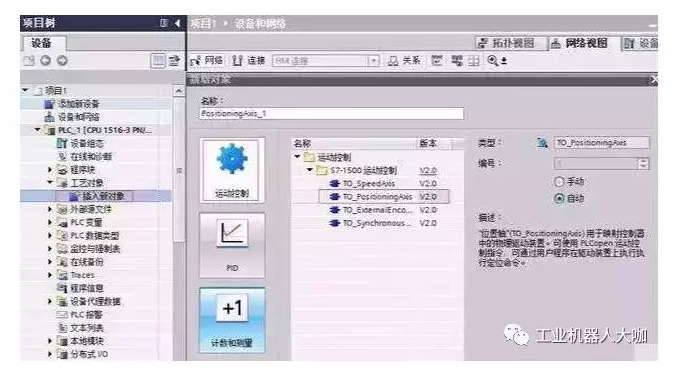
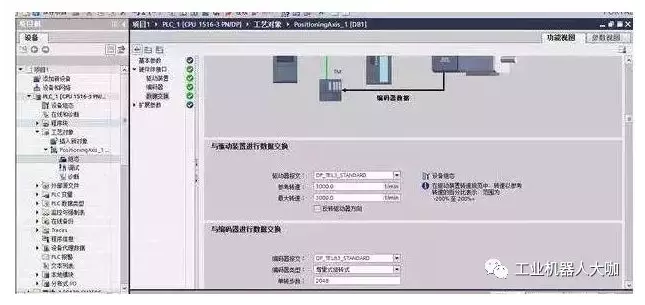
3.配置工艺对象
变频器配置参数
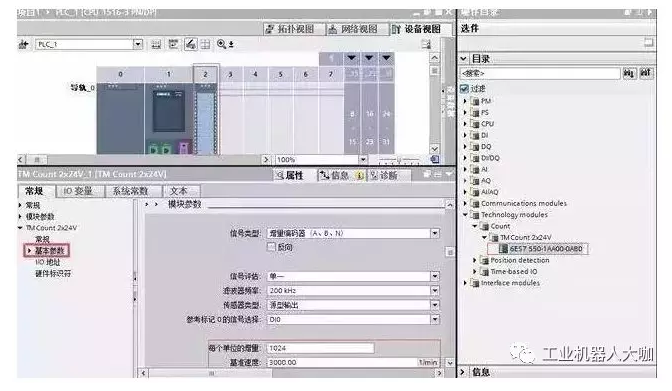
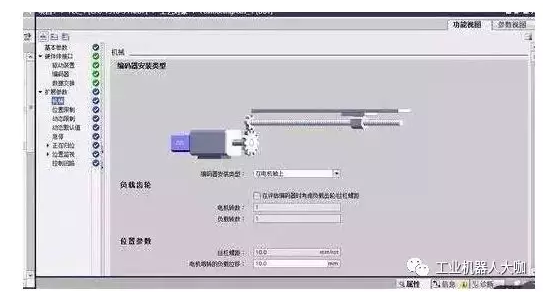
3.1基本参数设置
基本参数设置
3.2编码器参数设置
编码器参数设置
编码器设置2
编码器设置3
3.3其他参数设置
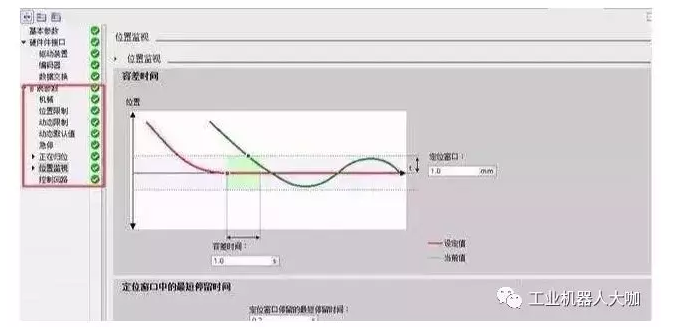
其他参数设置
4.在线调试诊断
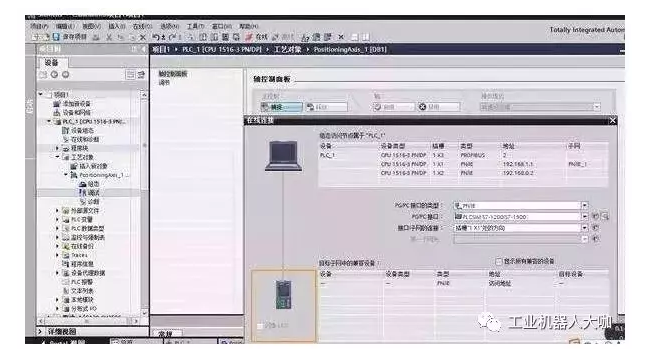
在线调试诊断


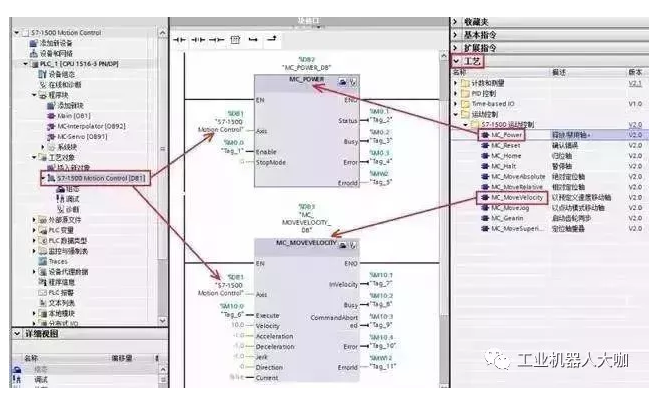
5.编程下载
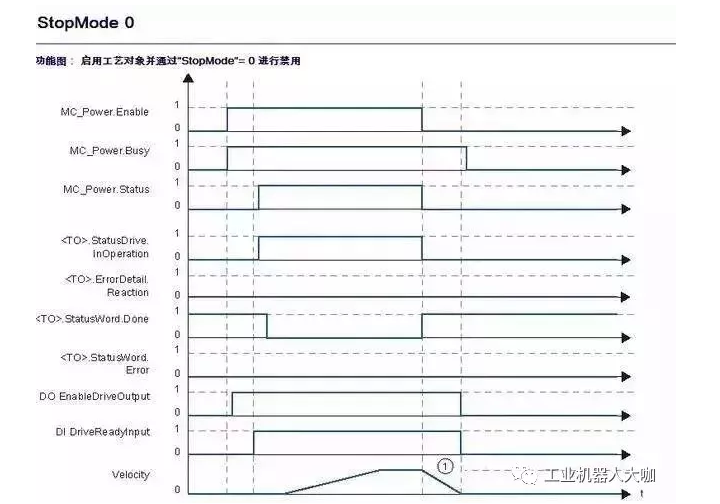
时序图
三、总结
PROFI drive是变频器制造厂商为优化周期通信而开发的用户数据框架,目的是提供变频器PROFIBUS接口的制造厂商标准,使集成、调试时间最小化,这个FAQ描述了控制器和变频器之间周期通信的常用术语。
PROFIdrive Profile 2.0定义了周期通信的用户数据为PPO。主站使用PPO周期地读取从站参数,PPO分为两部分:PKW区和PZD区。分成两个区的结果是在处理时间上有所区分,通常对PKW处理要比PZD慢。
通过PKW可以任意地监控/修改变频器的参数。例如,可以读出故障值或者是最小、最大限制。PKW区至少由三部分构成,分别是参数号码PKE、参数下标IND、参数值PWE,参数值PWE占用两个字。有的PPO类型没有PKW区。
PROFI drive是一种方便快捷有效的通讯控制方式,能将简单的控制反馈器件结合起来实现较为复杂&准确的控制系统。

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-05-03 06:24:25
- 2022-11-13 19:02:58
- 2022-11-03 16:40:28
- 2021-08-02 13:45:08
- 2021-08-03 13:45:41
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









