




SciSmart图像定位:ROI的生成和ROI的校正算法

在机器视觉应用设备在图像处理中,在被处理的图像上以方框、圆、椭圆、不规则多边形等方式勾勒出需要处理的区域,称为感兴趣区域,简称ROI,即感兴趣区域(ROI,region of interest)。在图像处理领域,感兴趣区域是从图像中选择的一个图像区域,这个区域是图像分析所关注的重点。圈定该区域以便进行进一步处理,或使用ROI圈定你想处理的目标,可以减少处理时间,提高精度。
在具体的视觉应用中,当工件来料位置固定不变时,常量ROI可以覆盖工件来料。但是当来料位置存在较大波动时,就无法通过固定的ROI来实现视觉应用。这时候我们可以通过粗定位对产品进行定位,根据定位位置、长宽,角度等数据使用生成ROI,通过生成ROI工具来满足视觉应用的要求;或者通过粗定位数据使用ROI校正工具对固定的ROI进行仿射变换,跟随产品位置来满足视觉应用的要求。
小编讲解的内容是ROI生成和ROI校正两大功能。
什么是ROI生成?
ROI生成,通过在图像上绘制一个ROI或者用前面模块的输出结果,或用户定义的指定数据生成特定ROI。可以创建的ROI类型有:点、直线、旋转矩形、椭圆、环形、不规则。
在后面的算子中调用所生成的ROI,将不进行全图搜索检测,只在ROI区域内进行搜索,这样可以屏蔽不感兴趣区域,令检测时间缩短。
一、ROI生成的应用场合
1、目标物体周边存在干扰点时,可以通过限定感兴趣区域来规避;
2、图片数据量大,感兴趣区域小,可以通过划定感兴趣区域,令检测时间缩短;
二、ROI生成算法界面
如图1中蓝色矩形框即为划定的旋转矩形ROI:
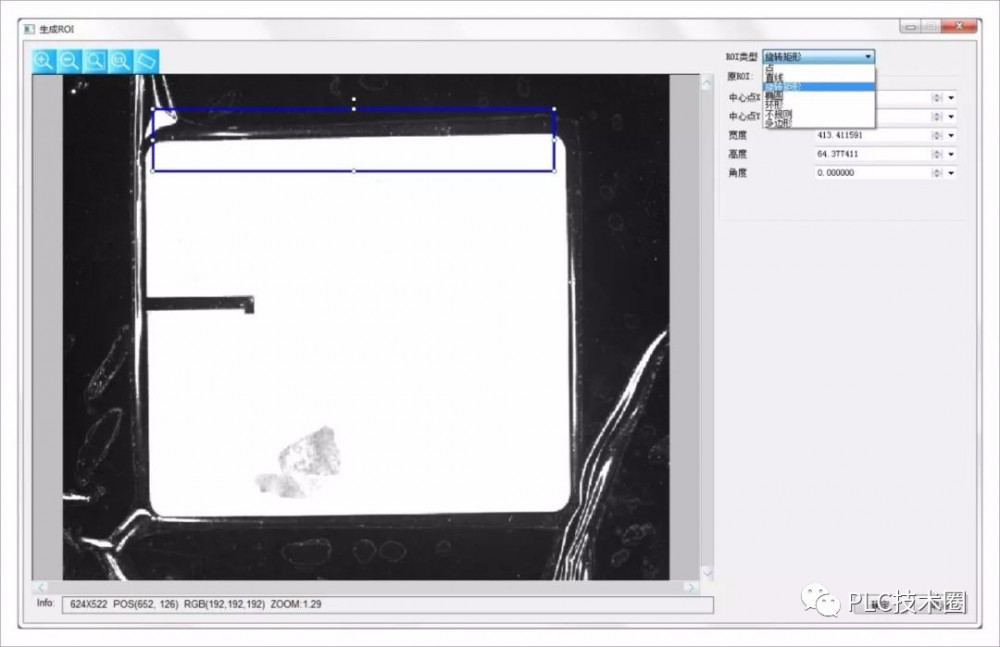
图1 ROI生成功能界面
三、ROI生成参数设置
ROI类型:支持自定义的ROI类型。
1、点
2、直线
3、旋转矩形
4、椭圆
5、环形
6、不规则
7、多边形
ROI的生成可手动自定义参数,也可以从外部引用变量参数,如图2所示:

图2 ROI类型示例
四、应用场合案例
图3中矩形框即为划定的矩形ROI,ROI设置选定ROI生成后,找直线功能只在该ROI区域进行搜索边缘点。
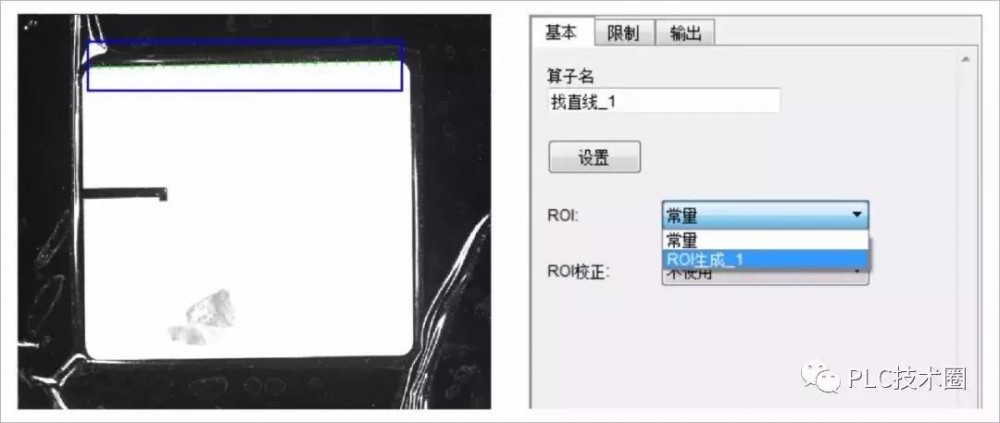
图3 ROI生成案例
什么是ROI校正?
在实际应用中,每一个待检测工件在图像中的位置都发生偏移,从而ROI也需要移动,否则会导致检测不到所需要的特征。此时就可以创建定位基准,使ROI跟随基准移动,能够很好的解决这个问题。
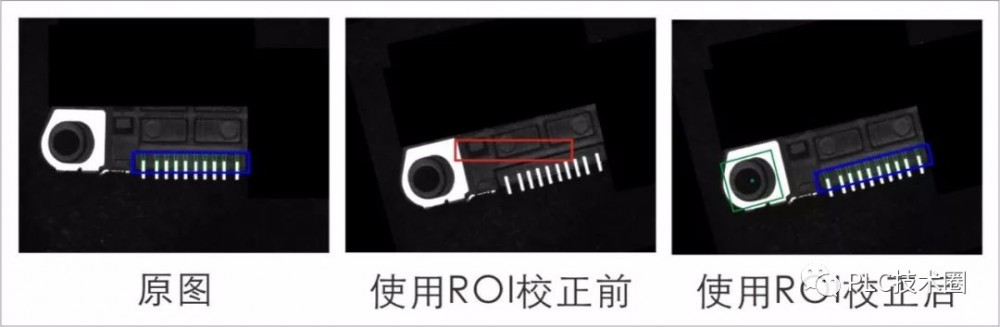
图4 使用ROI校正前后效果对比示例
一、ROI校正应用场合
1、定位产品抓取类项目应用
2、定位产品放料类项目应用
3、激光打标、切割类项目应用
4、点胶、焊点定位类项目应用
二、ROI进行校正的步骤
第一步:确定基准源。通过匹配或Blob分析等功能对此图像部分进行分析,获得基准点和基准角度。
第二步:选择生成仿射矩阵的参数。根据校正模式、参考点、参考角度生成仿射变换矩阵。
第三步:引用基准对ROI进行校正。选择支持的ROI校正方式的算子(例如定位、测量、检测、识别等算子工具),在算子中引用ROI基准对应的仿射变换矩阵,使ROI跟随基准进行移动,保证ROI能够准确框住测量区域。
三、算法原理
其工作原理是找到校正前后的基准点及基准角度,通过两点和两角度之间的关系计算出仿射变换矩阵,原ROI的位置信息通过仿射变换求得校正后的位置信息,根据校正后的位置信息重新生成ROI。
校正模式:补正可选方法有水平方向补正,垂直方向补正,水平和垂直方向上进行补正,水平、垂直以及角度进行补正,水平方向加角度补正,垂直方向加角度补正。
参考点:依据参考点计算出仿射矩阵中平移分量,可以由Blob分析结果、匹配结果、几何关系或用户自定义变量等点变量构成。
参考角度:依据参考角度计算出仿射矩阵中旋转分量,可以由Blob分析结果、匹配结果、几何关系或用户自定义变量等数值变量构成。

图5 ROI校正原理

图6 ROI校正示例
四、应用场合案例
以灰度匹配的匹配结果中心点作为参考点,选择水平和垂直方向上进行补正,生成带有平移分量的仿射变换。当工件的位置发生偏移时,ROI校正能保证ROI相对于工件测量的位置是不变的,从而能够精确地进行找圆操作。
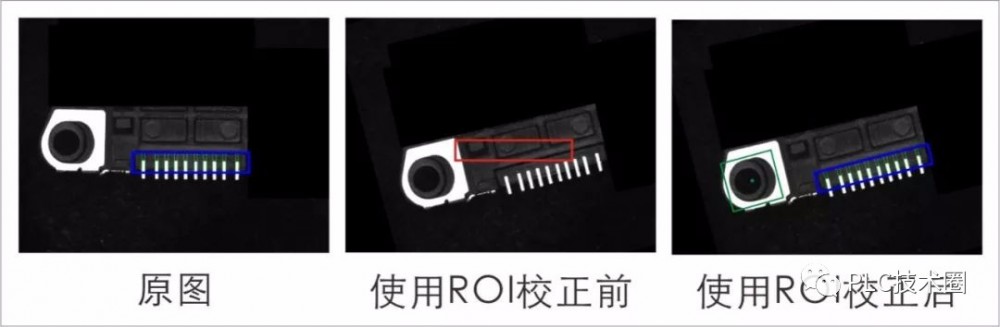
图7 ROI校正案例示意

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-01-05 07:03:45
- 2023-01-29 10:15:04
- 2022-08-29 13:16:11
- 2022-09-21 10:03:03
- 2022-09-28 15:16:41
- 2022-08-03 10:20:40
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









