





【方案分享】关于工业机器人自动喷砂工作站方案(下篇)

2.3、振动筛分选器(剔除规格不符合的砂料)
振动筛网分离器配置有二层筛网,那么振动筛最上出口为大尺寸杂质、第二层出口为合格的砂料、第三层出口为细小破碎的砂料。
振动筛分装置是利用振子上、下重锤产生的激振力,带动筛体进行振动,其上重锤使筛面产生平面旋振运动,下重锤筛面生锥面旋振运动,而两生锤配合作用使物料在筛面上进行复旋形运动,达到筛分目的。

设备特点:
2.3.1、占地面积小,筛分效率高,不易堵筛孔。
2.3.2、噪音低,密封好,环境污染小。
2.3.3、体积小,重理轻、结构合理、容易操作。
2.3.4、进料口与出料口水平距离小,且可以水平360度旋转,便于工艺布置。
2.3.5、崩网结构选进,崩网速度快,且不易损坏筛网。
2.4缓冲料斗
本机配置1台缓冲料斗,用作储备砂料;采用优质钢材和板材焊接而成,出厂前喷底漆和面漆。有效容积均为0.3立方米。下挂气动放砂阀,自动向喷砂机罐中添加砂料。
(三)压送式喷丸机
名称:固定式压送式喷砂机
型号:ACMR-1560
技术参数:
桶径:Φ600mm
高度:1500mm
理论容积:0.3m3
喷砂方式:气动控制
达到喷砂质量标准:ISO8501-1清洁度Sa2.5级
ISO8503-1粗糙度Ra25-125um
(四)除尘器
含尘气体由进风口除尘器过滤室内,因气流体积突然扩张流速骤然降低,颗粒较大的灰尘在自身重量的作用下,从含尘气流中沉降到沉降室内,其余尘粒由于滤筒的筛滤、碰撞、钩住、扩散、静电等各种效应的作用,被阻滞在滤筒的外壁。净化的气体通过滤筒进入清洁室,经过导风管到出风口排出。当滞阻在滤筒外壁的尘粒不断增加时,除尘器阻力不断增大,为了保证除尘器的阻力控制在限定的范围内,由脉冲控制仪发出信号循序打开电磁脉冲阀,使气包内的压缩空气由喷吹管喷射到对应的导风管内(称为一次风),并在高速气流通过导风管时,诱导数倍于一次风的周围空气(称为二次风)经过清洁室进入滤筒,造成滤筒瞬间急剧膨胀、收缩,使积附在滤筒外壁上多余的尘粒被清洗,落下的灰尘经排灰系统排出,使滤筒得到清洗。
1.1除尘器主要技术参数:

(五)内壁喷枪:
本机配置的内壁喷枪为折射型喷枪、口径8mm,喷枪杆为高硬度合金材料、喷枪头为超高硬度合金材料。工作时喷枪插入工件内部,由机器人作升降运动,工件旋转,完成喷砂工作。
(六)外壁喷枪:
本机配置的内壁喷枪为压送式喷枪、口径6mm,喷枪头为超高硬度碳化硼。工作时喷枪离工件受喷表面150mm左右,由机器人作升降运动,工件旋转,完成喷砂工作。
内壁喷枪与外壁喷枪可以同时工作,一起完成工件内外壁表面喷砂工作。
(七)除尘风管
除尘管道连接旋风分离器到除尘器之间的管道,是将粉尘输送到除尘器中,由钢板焊接而成。
(八)机器人可调底架
机器人可调底架又型钢、钢板焊接而成,通过调节机构实现机器人上下、前后位置调节。
(九)机器人:ABB机器人 IRB 4600
四、工作站平面图
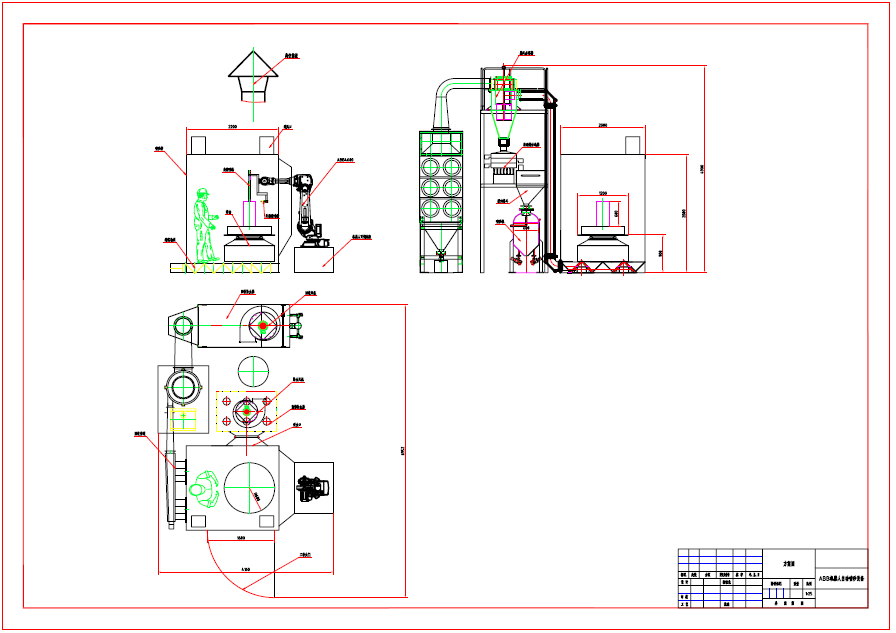
附件 IRB4600/2.05-60机器人参数
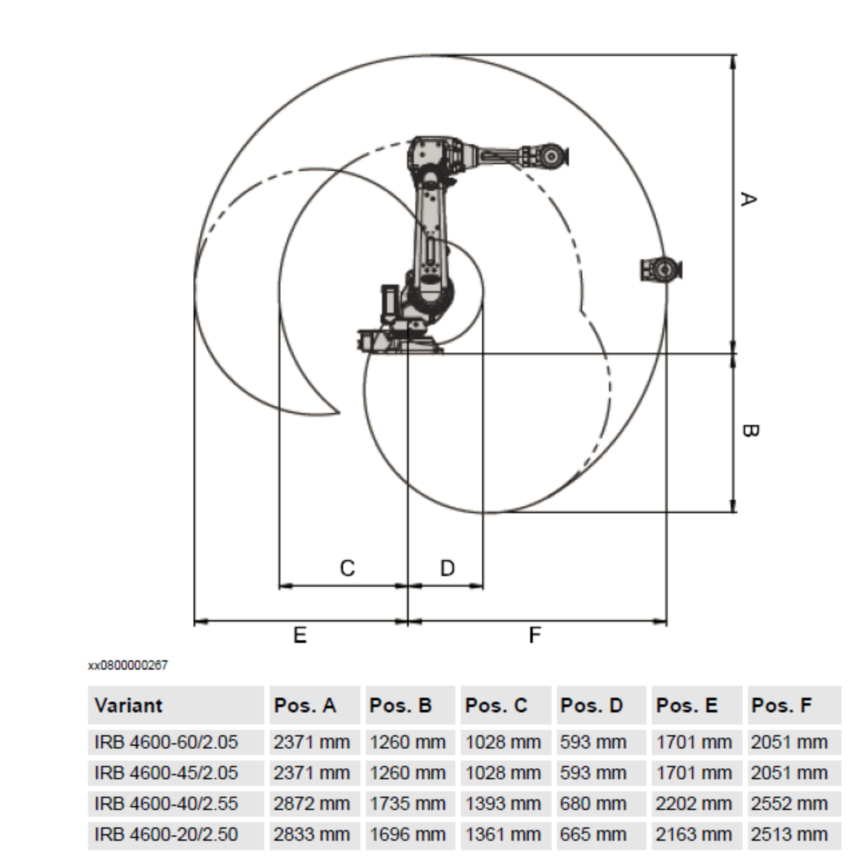
1.1 机器人参数
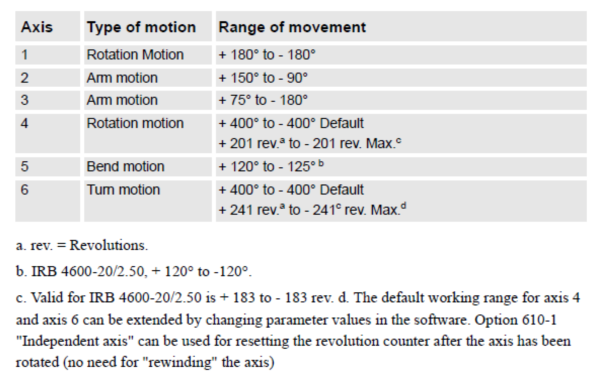
机器人各轴运动及工作范围
各轴运动范围
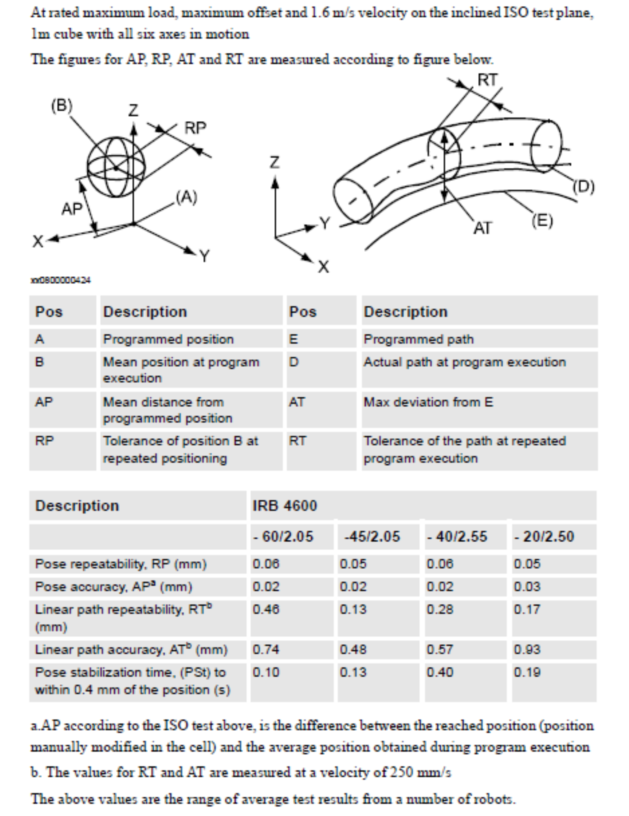
机器人精度ISO9283
1.2 IRC5控制柜

控制硬件:
多处理器系统
PCI 总线
奔腾CPU
大容量闪存(128M)
20s UPS 备份电源;

控制软件:
BaseWare5.0 机器人操作系统
强大的RAPID编程语言
PC-DOS文本格式
软件出厂预装,并存于光碟;
电气连接:
电源: 3 相 400V(+10%,-15%),50Hz;
输入输出: 数字式直流24V;
安全性: 紧急停止,自动模式停止,测试模式停止等;
物理参数:
尺寸: 970mm×725mm×710mm;
重量: 150 kg;
环境参数:
环境温度: 0C -45C;
相对湿度: 95%;
防护等级: IP54 ;
操作界面:
控制面板: 控制柜上
编程单元: 便携式示教盒,具备操纵杆和键盘
彩色触摸式显示
具中、英文菜单选项
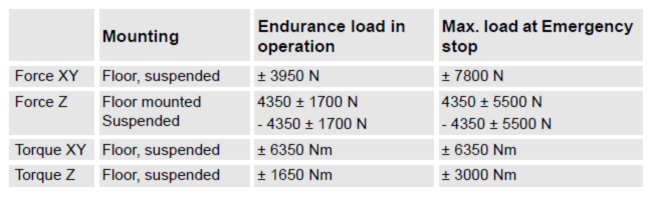
1.3 机器人动载荷
机器人底座和地基施工时必须考虑紧急情况下的机器人最大动载荷。
IRB4600机器人动载荷
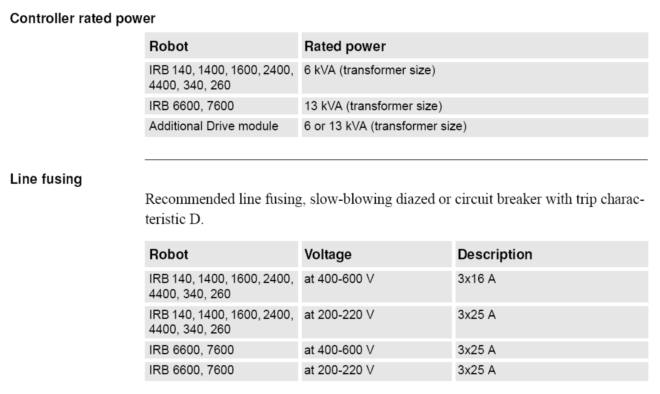
1.4 机器人电气接口
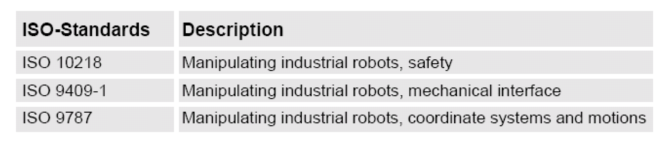
1.5 标准
机器人符合ISO标准。

好的文章,需要您的鼓励
20

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









