





工业机器人行业上游核心零部件之控制器行业分析

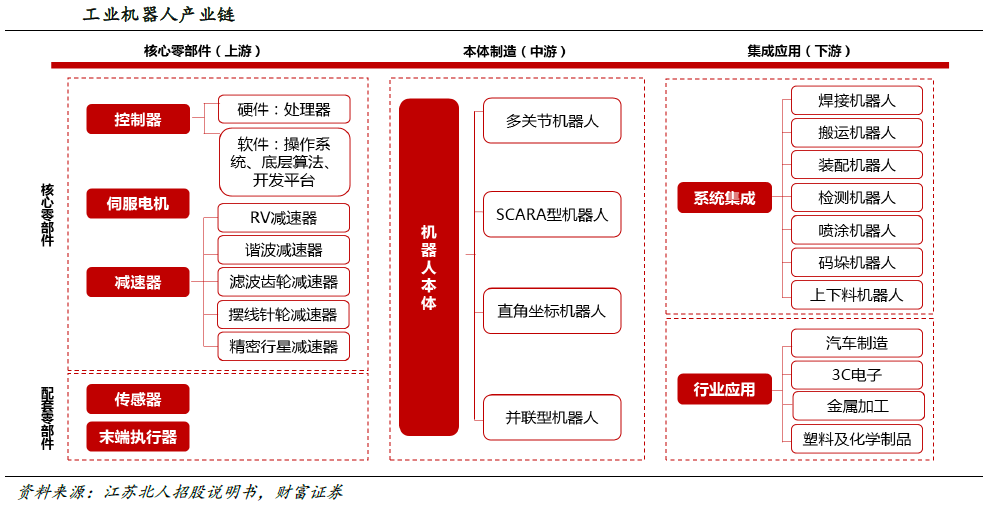
工业机器人产业链包括上游核心零部件、中游机器人本体和下游集成应用三部分。上游是控制器、伺服电机、减速器、传感器、末端执行器等零部件的生产厂商,控制器、伺服电机和减速器是工业机器人三大核心零部件;中游是本体生产商,负责工业机器人本体的组装和集成,即机座和执行机构,包括手臂、腕部等,部分机器人本体还包括行走结构;下游是集成应用商,负责根据不同的应用场景和用途对工业机器人进行有针对性地系统集成和软件二次开发。
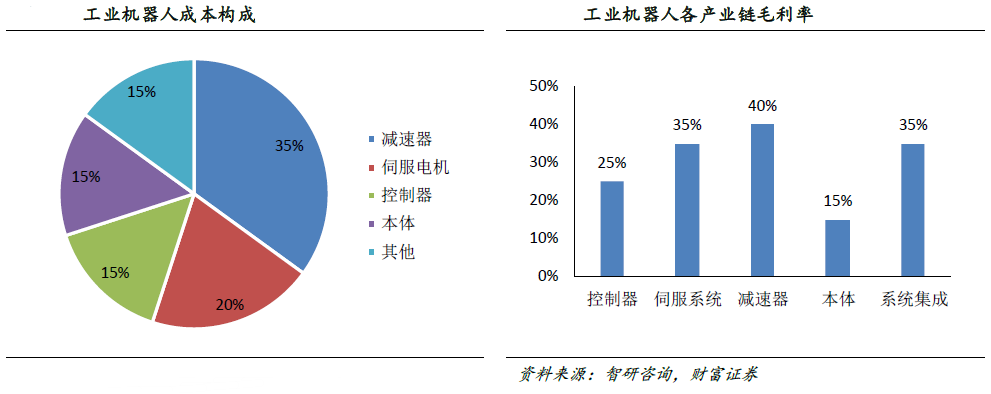
其中,工业机器人产业链的关键环节为上游核心零部件,占据了工业机器人整机大部分的成本和利润,也是技术上的核心和难点,是影响机器人性能最重要的部分。控制器、伺服电机、减速器这三大核心零部件的成本占工业机器人总成本约70%,其中减速器占整机成本约35%,伺服占整机成本约20%,控制器占整机约15%,而本体和其他部分仅占整机分别为15%、15%。
在所有核心零部件中,减速器的毛利率最高,达到40%,伺服电机和控制器毛利率分别为35%和25%。三大核心零部件的技术水平决定了工业机器人的工作精度、负载、寿命,以及稳定性和可靠性等重要性能指标,谁掌握了三大核心零部件的技术和能力,谁就占领了工业机器人产业链的制高点,拥有很强的定价权。
关键环节受制于人,严重制约产业健康快速发展。虽然我国机器人产业已经取得了长足进步,但与工业发达国家相比,还存在较大差距。机器人产业链关键环节缺失,核心技术创新能力薄弱。
目前我国工业机器人市场上游核心零部件的供应大部分被国外厂商所占据,国内厂商大多集中在中游的机器人本体组装和下游的系统集成,承担系统二次开发、定制部件和售后服务等附加值低的工作,使得国内机器人市场的巨大潜力带来的产业红利被国外厂商占据。
国内涉及减速器研发的企业有10 余家左右,具备量产出货能力的仅5-6 家,市场几乎被日企所垄断。控制伺服系统方面,国内企业有一定的自主配套能力,国产品牌市场份额在15%左右,高精度减速器、伺服电机和控制器等核心零部件依赖进口导致我国高端机器人产品质量可靠性低,机器人推广应用难,市场占有率低,企业“小、散、弱”问题突出,产业竞争力缺乏。
国外工业机器人巨头本身就是核心部件的提供商,因此他们在零部件成本上拥有先天的成本优势和技术优势,另外他们往往能以大的采购量和签署排他性协议获得比较优惠的采购价格,而国内的中小企业在进口核心零部件时,往往要以显著高出国外厂商的价格购买减速器和伺服电机等核心零部件,这些都严重削弱了国产品牌机器人的市场竞争力,使得国内机器人企业难以形成规模优势。
1、控制器介绍
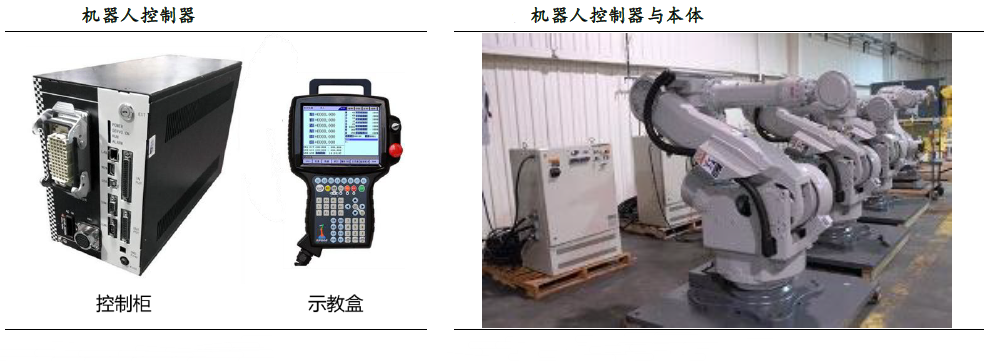
(1)功能:控制器是机器人的小脑,主要负责控制和协调机器人运动
控制系统是工业机器人的主要组成部分,其机能类似于人脑控制系统,支配着工业机器人按规定的程序运动,并记忆人们给予工业机器人的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对工业机器人的动作进行监视,当动作有错误或发生故障时发出报警信号。工业机器人控制系统分为处理器和控制器两部分,处理器用来计算机器人关节的运动、监督控制器与传感器协调动作,其功能相当于人类大脑。控制器从处理器中获取数据,控制驱动器的动作,并与传感器反馈信息一起协调机器人的运动,其功能相当于人类小脑。
(2)组成:控制器由硬件及软件两部分组成
控制器硬件核心在于芯片,为了保证控制系统具有足够的计算与存储能力,目前机器人控制器多采用计算能力较强的ARM 系列、DSP 系列、Intel 等系列芯片。软件包括操作系统和算法库两部分,机器人专用操作系统包括VxWorks(嵌入式实时操作系统)、Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台等,其中Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台为使用较多的开源操作系统。算法库包括底层算法库以及应用工艺算法,底层算法库的运动学控制算法即规划运动点位,负责控制机器人末端执行器按照规定的轨迹达到指定地点。动力学算法负责识别每一个姿态下机身负载物的转动惯量,使其保持最优化输出的状态。应用工艺算法即二次开发,针对不同行业的应用工艺算法,只有在掌握底层算法的基础上才能较好地实现应用工艺算法。
(3)技术趋势:驱控一体化成为轻载型机器人的主要方向
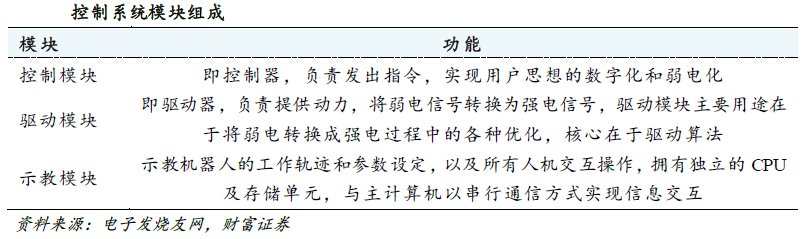
总线型控制系统越来越普遍。以太网和现场总线技术的发展为机器人提供了更快捷、稳定、有效的通信服务,基于现场总线的控制系统由控制模块、驱动模块和示教模块三部分组成,三者间的信号传输由电缆或网线完成。总线型控制系统三大模块功率不受限制,具有实时性好,易于实现高速、高精度控制,易于扩散等优点,但缺点在于传输速度慢、硬件体积大、成本较高,因此适用于控制多个大型机器人的工业场景。发达国家总线控制方式已经发展多年,具备比较成熟的总线产品和方案。国内控制器公司处于追赶阶段,成效显著。例如2015 年卡洛普推出基于实时以太网的总线型机器人控制器;2018年,雷赛智能推出EtherCAT & RTEX 总线方案,未来总线方案的控制器使用将越来越多。

驱控一体化成为轻载型机器人的主攻方向。相较于传统机器人较大的落地式控制柜,“驱控一体”能够将控制柜的体积缩小到台式机大小,从而节省了空间。因此,“驱控一体”设备在轻载机器人上的使用具备优势,比如SCARA 机器臂、并联机器臂、桌面型小六轴机器人。这类机器臂所用关节功率较小,在400W 左右,容易做集成化设计。而且这些机器臂对空间的要求也会比较高,所以“驱控一体”的优点能得到充分体现。
驱控一体化是巧妙地将伺服驱动技术、运动控制技术和机器视觉技术融合在一台机器上,通过内部高速并行总线进行信息交换,充分满足细分行业的应用定制和工艺定制要求。与总线型控制系统结构不同的是,驱控一体控制系统将控制模块与驱动模块融合在一起,两者以内部总线的方式进行通讯。内部总线的原理类似于数据共存,两者间不需要任何电缆或网线进行信号传输。总线型控制系统的通讯速度为毫秒级,而驱控一体控制系统能够实现千分之一毫秒级通讯速度,在速度和精度要求极高的场景下驱控一体控制系统优势完全凸显。驱控一体控制系统优点在于通讯速度快、体积小、成本低,但缺点是功率受限,不适用于汽车厂大型六轴机器人等工控场景。
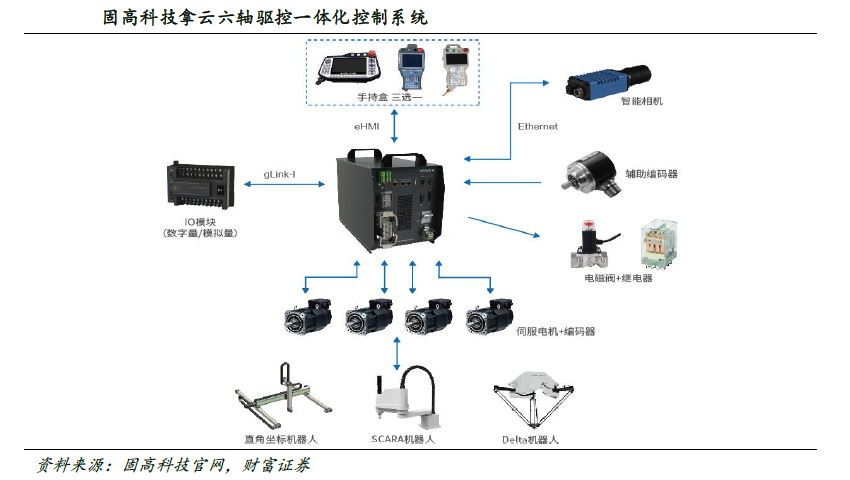
国内控制器领先企业固高科技早在2010 年便提出了驱控一体化的产品体系架极,并基于此承接了国家863 计划。公司推出的拿云六轴驱控一体机囊括了工业机器人控制系统开发平台、运动控制器和六轴伺服驱动器,具有体积小、功率密度高、集成度高等特点,提高了设备性能和可靠性。新时代子公司众为兴推出的驱控一体控制器QC400A,具备多轴直线插补,3D 空间圆弧插补,轨迹跟随,平稳加减速,连续运动轨迹速度自适应功能、样条曲线教导,振动抑制等功能。
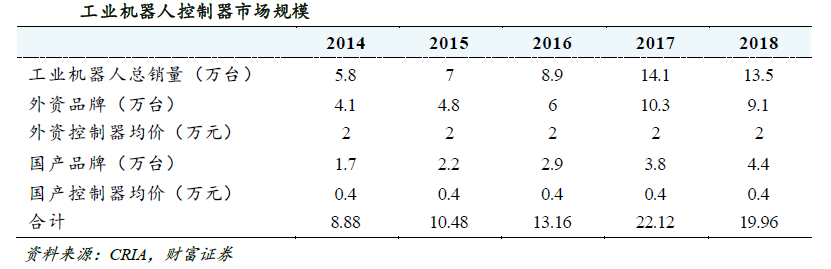
受益于我国的工业机器人市场强劲需求,工业机器人控制器需求量也呈现同步增长。据IFR数据显示,假设:
(1)以进口工业机器人控制器和国产工业机器人控制器价格分别为2 万元和0.5 万元;
(2)外资品牌使用进口控制器,国产机器人品牌使用国产控制器。可以大致估算出我国近年来的工业机器人控制器市场规模,2018 年我国工业机器人控制器市场约为20 亿元,现有空间有限,但前景广阔。
2、控制器市场格局与国内外差距
国内工业机器人控制器市场多被日系及欧美品牌占据。控制器一般由机器人本体厂商自主设计研发,主流的机器人厂商均有自己的控制系统与之匹配,国内工业机器人控制器市场多被日系及欧美品牌占据。以发那科、安川机器人、库卡、ABB机器人 为代表的四大家族普遍采用自产自用的生产模式,其在中国工业机器人控制器市场的占比与其在本体市场的占比基本保持一致,达40%以上。2018 年国内自主品牌机器人本体市场市占率达32.3%,而在工业机器人控制器市场仅占约15%,国内企业控制器尚未形成市场竞争力,部分本体生产厂家的控制器需要通过外购国外厂商。
控制器硬件芯片依赖进口,软件算法差距较大。经过多年的沉淀,国内厂商的控制器硬件方案已经达到国际性水准,但物料受到限制,底层芯片依赖进口,国内尚无研发基础。在软件上,国际工业机器人品牌起步较早,经验与数据非常丰富。比如发那科在1974 年就开始进行工业机器人的生产制造,其建立的“机器人生产机器人”生产线更是为其提供了大量的经验与数据来改进算法。国内厂商目前在运动学控制算法领域已基本实现国外先进算法,但在动力学算法上与国外先进水平等仍有一定差距,差距体现在算法的精准性,即是否能达到效率最优状态。
另外,底层算法的差距导致国产控制器的应用工业算法受到限制,且国外机器人控制器有相当部分功能存在技术封锁,国产品牌目前大多集中在较为简单的搬运、码垛领域,而且软件的稳定性也不如国外,出现故障的概率比进口产品高。
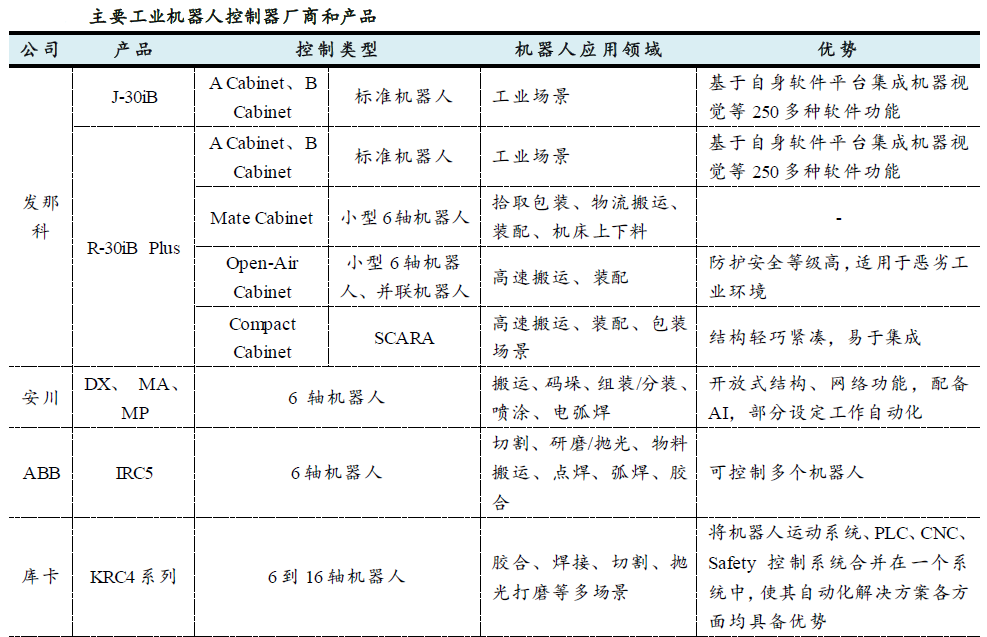
根据《国家机器人标准体系建设指南》,机器人控制器关键技术要求包括运动精度、动态性能、高速总线接口、控制轴数、插补周期、软件性能、功能安全和可靠性等技术要求。对比主要工业机器人生产厂商的控制器产品,国产控制器硬件与软件平台与国外厂商基本一致,并且可控制的机器人类型齐全,其中不乏六轴、八轴机器人,不输国外厂商,主要差距在于控制算法、安全性能以及可靠性设计等方面。安全性能差距体现在国际厂商均已取得欧盟CE 安全认证,并掌握多种安全功能,而国内仅有少部分厂商获得CE 认证。同时国际厂商的抗震、抗冲击性能也要优于国内品牌。
国内工业机器人生产厂家的控制器主要具有价格优势。随着微电子技术的快速发展,处理器的性能越来越高,成本越来越低廉,高性价比的微处理器使得开发低成本、高性能的工业机器人控制器成为可能。KUKA 控制器价格为5.8 万元,而固高只需6 千元。国产控制器性价比高,可抢占对机器人精度要求不高的、通用型机器人的市场需求。

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2018-11-19 09:34:18
- 2020-08-28 12:45:16
- 2019-02-27 14:27:40
- 2020-01-19 15:38:45
- 2020-01-24 10:00:49
- 2020-01-23 10:00:11
- 2022-11-02 21:03:52
- 2022-10-24 15:59:00
- 2022-11-09 22:04:59
- 2022-10-11 17:40:17
- 2023-01-01 15:21:30
- 2018-12-24 14:40:49
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









