





机器人的工作空间影响末端夹持机构设计

今天分享机器人的工作空间是如何影响其末端夹持机构的设计的,还与机器人的工作对象和负载的关系都分不开的,文中附有详细图解。
一、机器人的工作对象和负载
机器人的工作对象为轮胎,如图1所示,包括生胎和成品胎;二者在性质和尺寸上都有差别,生胎较软,成品胎较硬,成品胎较生胎外圈直径较大、内圈直径较小、高度较小。每个轮胎净重约为3Kg。此外,由于成品胎与模具黏合较紧,取胎时轮胎对机器人末端夹持机构有500~600N 的冲击力。
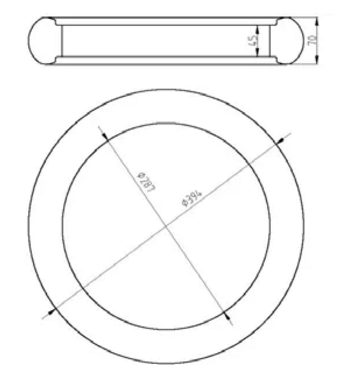
图1
二、机器人的工作空间
如图2为机器人工作相对位置图,图3为相对高度图。
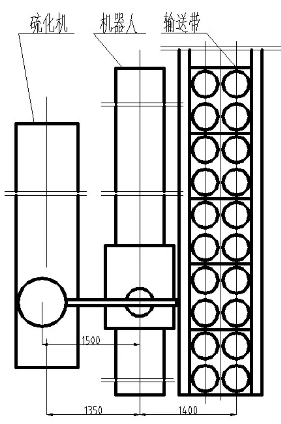
图2
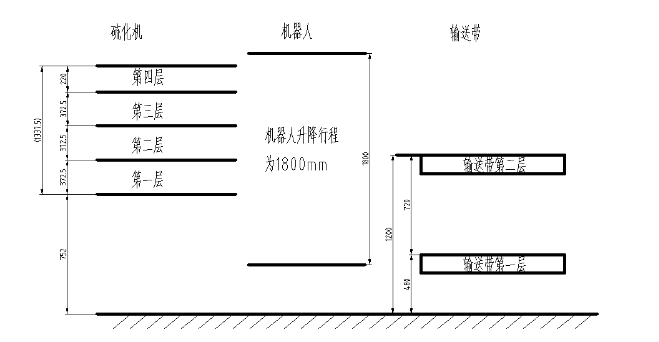
图3
三、机器人总体结构设计
轮胎装卸机器人采用圆柱型工业机器人,直线部分可采用液压驱动,可输出较大的动力,能够伸入型腔式机器内部。下图机器人具有三个自由度,即两个移动副、一个旋转副:底座与其他部分之间为移动副、腰部与底座间为旋转副、小臂与大臂之间为移动副。
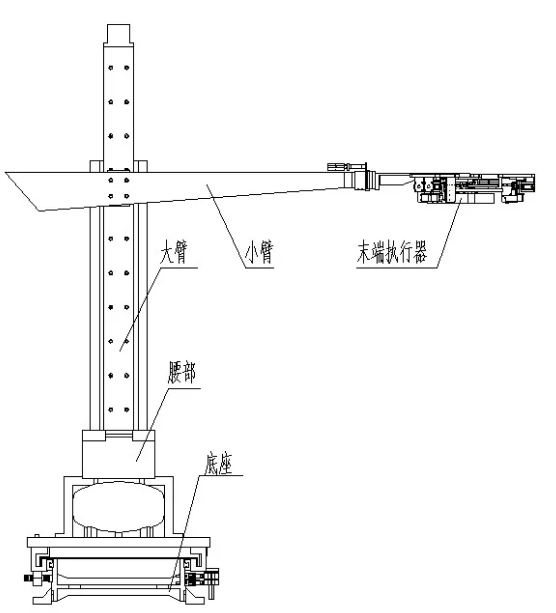
图4 机器人主要结构图
四、机器人末端夹持机构的设计
机器人本体是机器人末端夹持机构运动到定点的基础,而机器人手爪(末端夹持机构)是机器人胜任预期任务的基础,因此设计三套机构:内撑机构用于完成抓取和定型、下压机构用于完成生胎安放、外推机构和内撑机构共同完成成品胎抓取。
4.1内撑结构的设计
由于必须使轮胎内径完全与夹持机构相接触,所以通过内撑力使轮胎定型。内撑机构由五个相同的连杆机构组成,并呈圆形排列。每个连杆机构由三个连杆组成,但机构曲柄由一圆盘代替,因此可视为一个四连杆机构。
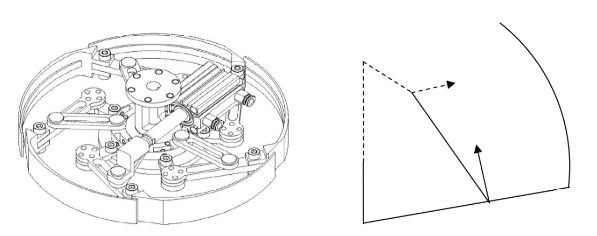
图5 內撑机构示意图
4.2下压结构的设计
内撑结构抓起轮胎之后,其中的五个圆弧会构成一个整圆与轮胎内径完全接触。当轮胎运送至模具上方后,气缸收缩,此时由于生胎较为柔软,会立即变形,无法顺利进入模具。因此设计下压机构,用一个双滑块机构实现水平方向运动与竖直方向运动的转换。
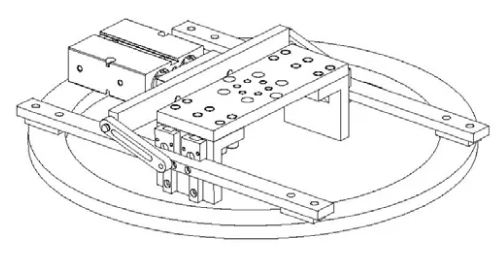
图6 下压机构示意图
4.3外推机构的设计
外推机构由三组推手组成,每组推手有两个推动装置。其中一个由气缸推动直接前进;另一个由气缸、平行四边形机构、双滑块机构组成,沿椭圆曲线作平动。控制两个推动装置动作的时序,可以完成抓取任务。
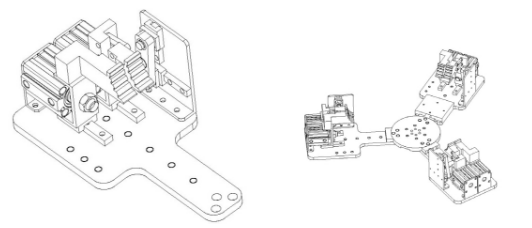
图7 外推机构示意图
4.4夹持机构总体效果
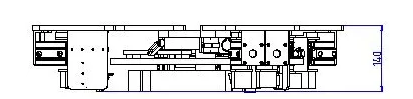
图8 正视图

图9 俯视图
五、一些优秀的夹持器介绍
Onrobot RG6 -分拣和取放 - 操作灵活,行程更大,动力更强劲

• 操作灵活,可处理多种尺寸和形状的零件。
•“即插即用”设计,显著缩短部署时间。
• 开箱即用,易于部署,减少70%的编程时间。
RG6夹持器是一款灵活的协作式夹持器,内置Onrobot快换装置。全新支架设计,让夹持器方向控制变得更简单,同时保留了出色的移动、放置行程。电线布线穿过快换装置,绕开侧面,因此在更换工具时无需重新连接和断开。这款夹持器可无缝配合Onrobot双快换装置和任意一款夹持器,助您充分发挥机器人的最大潜能。
易于使用,可兼容多种协作式和轻工业机器人。
RG6夹持器的行程为160毫米,可拾取各种各样的物品。如今,RG6配备了更强劲的马达,更加坚固耐用。这款灵活的全方位夹持器可帮助您扩大自动化应用范围,包括机床管理、分拣和取放、组装、包装和码垛等。
Onrobot GECKO GRIPPER壁虎夹持器

一“抓”即发——设计灵感源于自然界,实现温和而稳固的抓取操作
• 无需压缩空气,可节省维护成本,快速实现投资回报(最快5个月)。
• 精准、无痕夹持技术,可提高分拣和取放类任务的生产力。
• 采用创新的仿生壁虎技术,轻松处理PCB等平滑表面或多孔的物品,拓展您的自动化潜能。
• 无需外接气源,减少产生噪音和吸入灰尘。
仿生壁虎技术最初诞生于NASA的实验室,用于收集退役卫星、太空垃圾以及国际空间站应用。相比“神圣的太空任务”,壁虎夹持器更贴近“地表”——能够妥善地拾取表面平滑的物品,并擅长处理传统真空夹持器无法抓取的多孔物品。
壁虎夹持器使用数百万条细小纤维茎,利用强大的分子间作用力粘附于工件表面——这与壁虎攀爬的原理相同。壁虎夹持器的设计灵感源于自然界,采用轻巧的抓取技术,在分拣和取放类任务中,无需压缩空气或外部动力,即可附着和提起任何表面平滑的工件,为制造商提供一种更高效、更具成本效益的解决方案。

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-11-30 16:16:03
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









