





机器人滚轮式机械手指,可做到人手无法做到的事情
时间:2020-06-17
阅读:11203

机器人的形式一直是多样的,而研究人员们一直往设计“能在更生活化的真实环境中使用”的策略方向发展。例如,到处都是楼梯,因为人有腿,而腿也能爬楼梯,所以如果我们给机器人设计像人一样的腿,他们也会在楼梯上也行走,当涉及到机器人抓取工具时,我们也看到了这种趋势,在朝着拟人化方向做优化。

尽管受到人类自身生物的启发而产生了一些惊人的机械手,但夹爪设计中仍有可能创造出人类无法做到的事情。在ICRA 2020上,斯坦福大学的研究人员发表了一篇论文,该论文设计了一种机械手,该机械手的手指由致动的滚轮制成,从而可以操纵物体,将手指打结。
尽管它有几根手指,但该原型“滚轮抓紧器”手将拟人化的设计抛到了窗外,而采用了独特的手工操作方法。滚轮抓手确实与其他设计用于使用活动表面(如嵌入手指的传送带)进行手动操作的抓取器有一些共同特点,但是这里的新功能和令人兴奋的是,那些关节式主动滚轮指尖(或任何你想给它们起的非拟人化名字)提供了可操纵的主动表面。这意味着,手可以抓住物体并旋转它们,而不必借助复杂的手指重新定位序列,这就是人类的做法。
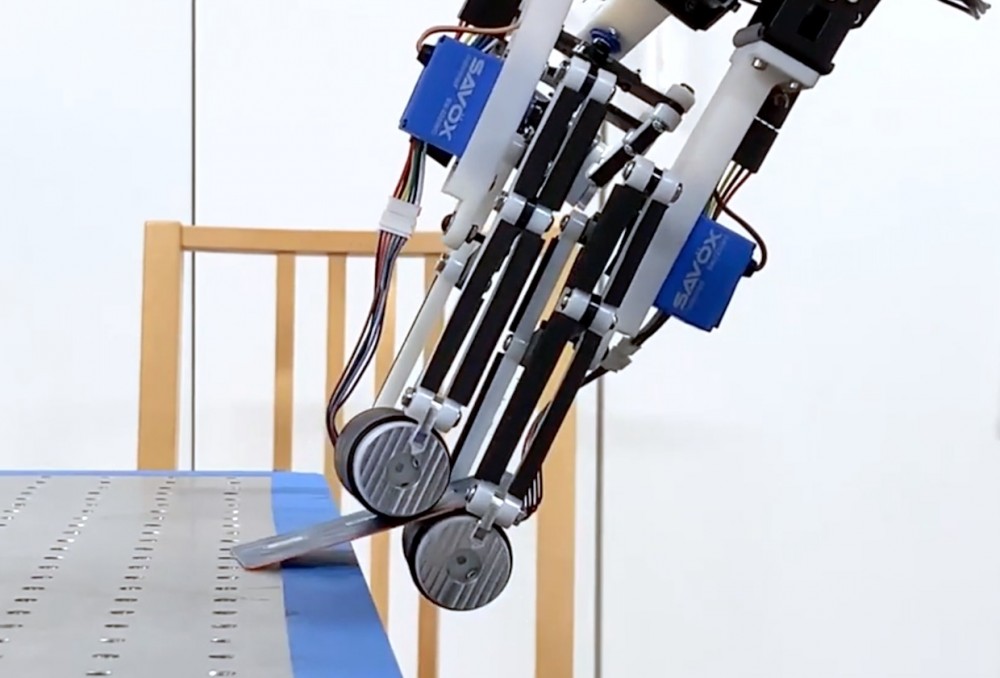
每只手的手指都有三个可驱动的自由度,从而产生了几种不同的方式来抓握和操纵物体。借助指尖滚轮,诸如轻巧地从桌子上捡东西之类的行为变得轻而易举,对于机器人手(有时也有人的手)也是很棘手事情。该夹具中物体的运动不是十分完整,这意味着如果不进行其他中间步骤,它就无法任意调整物体的方向。而且,它与许多其他抓取器的方式也不兼容,从而限制了某些类型的抓取。这种特殊的设计可能不会取代所有的抓手,但是在某些特定种类的操作上,它非常擅长以独特的方式操作。
机器人抓手
夹爪
前沿科技

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2023-06-09 10:13:18
- 2022-09-01 08:34:00
- 2023-04-15 16:25:03
- 2022-12-12 08:02:02
- 2022-12-07 17:03:36
- 2022-08-02 13:15:02
栏目推荐
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









