





科学家研发出混合型机器人机械手抓可刚可柔
时间:2020-07-23
阅读:9032

在机器人领域中,运用于不同场景的机械手臂各不相同,有的是抓力强,抓取刚刚性设备,而有的是细微之处见真章,抓取柔性的小东西。据外媒报道,科学家们创造了一种机器人抓手,他们声称这种抓手结合了两者的最佳功能。当涉及到拿起沉重、坚固的物体时,机器人通常会利用两指的抓手。由于其刚性设计,这些并没有特别温柔的触感,但它们可以施加很大的力量。而顺应性较强柔性机械手则通常用于搬运易碎物品。这类机械手不太容易打碎东西,但也不会有特别牢固的抓地力。
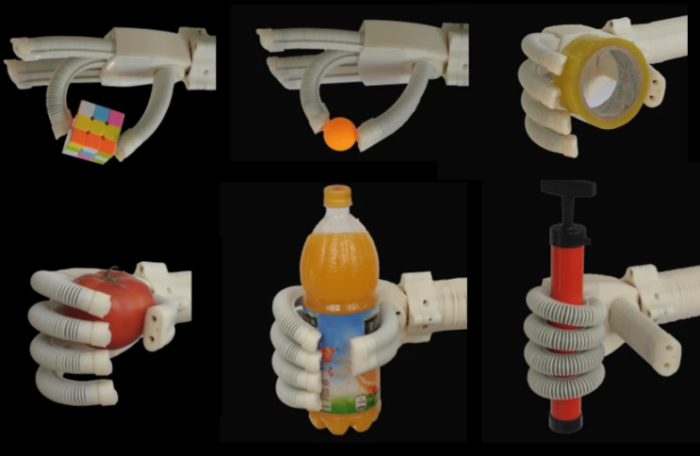
在Changyong Cao的带领下,密歇根州立大学的研究人员着手弥补两者之间的差距。最终的原型有四个手指和一个可对立的拇指,每个手指都结合了所谓的柔性混合气动执行器,或FHPA。每个FHPA的核心是一个 "骨状 "的叶状弹簧,其外部被较软的气动囊包围。
当空气被泵入和泵出这些气囊时,每个手指都会独立于其他手指打开和关闭。而且由于手指的外侧相对较软,它们能顺应易碎物品的轮廓,使这些物品保持完整。但同时,与完全软体的设备相比,片状弹簧能提供更多的抓取力。
研究人员希望一旦该技术得到进一步发展,支持FHPA的手可以被利用在摘果子操作、医疗和外科手术等应用中。最近发表在《Soft Robotics》杂志上的一篇论文对这项研究进行了描述。
机械臂
抓手
前沿科技

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2022-09-01 21:17:51
- 2018-07-08 19:00:22
- 2018-09-12 09:05:56
- 2022-08-10 11:15:04
- 2022-11-03 14:08:51
- 2018-09-02 10:00:31
栏目推荐
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









