





遨博机器人报错代码:路点命令 Waypoint和提前到达

11.5.2 路点命令 Waypoint
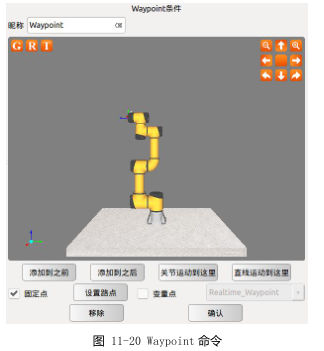
Waypoint(路点)是 AUBO i 系列机器人程序重要的组成部分,它表示机器人末端将要到达的位置点,通常机器人末端的运动轨迹由两个或多个路点来构成。
➢ 点击昵称右侧输入框可修改命令名称。
➢ Waypoint 只能添加于 Move 命令后。
➢ 点击添加到之前可在该路点前添加一个新路点。
➢ 点击添加到之后可在该路点后添加一个新路点。
➢ 点击移动到这里可让机器人运动到当前路点,针对真实机器人有效。
➢ 可以选择关节运动到这里或者直线运行到这里。
➢ 点击移除删除此路点。
➢ 点击设置路点可设置从路点的位置姿态。点击设置路点后,面板自动切换为机械臂示教,用户可以移动机器人末端到新路点的位置,然后点击右下角的确认按键。
➢ 点击确认保存此路点状态配置,此时会有弹窗跳出显示条件已被保存。可变路点(变量点)
在 waypoint 条件界面处选择变量点,确认后,此路点为变量设置中设置的路点,当变量中的路点更改后,工程文件中所有的路点均会更改,此功能可以批量更改相同的路点的参数,节省编程时间。变量点对应变量配置中的类型为 pose 变量。
相对路点(相对偏移)用户通过相对于选定坐标系的位置或姿态偏移量对机器人手臂或者末端工具坐标进行运动控制。
11.5.3 提前到达
按照距离目标的位置、时间或者交融半径选择提前到达,可以用以提高机械臂工作效率。
提前到达会依据用户设置的距离或者时间以及交融半径进行运行轨迹的调整,用以提高机械臂工作效率,因此会出现不经过某一个或多个设定路点的情况。
勾选提前到位按键可以通过选择按照距离目标位置或者距离目标位置时间提前到达。勾选此项 Move 命令下的 waypoint 会依据用户设置的距离或者时间进行运行
轨迹的调整,用以提高机械臂工作效率,因此会出现不经过某一个或多个 waypoint设定路点的情况。
通过勾选提前到位,选择按照距离目标位置,距离目标位置时间以及交融半径提前到达,用以提高机械臂工作效率。
提前到达会依据用户设置的距离或者时间以及交融半径进行运行轨迹的调整,用以提高机械臂工作效率,因此会出现不经过某一个或多个设定路点的情况。

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









