





遨博机器人报错代码:离线命令Offline Record和轨迹记录
时间:2020-11-19
阅读:9861

11.7.3 离线命令Offline Record
Offline Record 命令可以将离线编程软件生成的轨迹文件嵌入到在线编程里
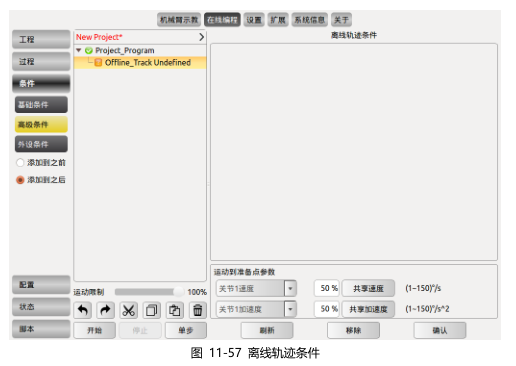
➢ 选中离线文件,点击确认保存。
➢ 界面下侧输入框可以设置机械臂运动到准备点时各个关节的速度及加速度。修改后请点击确认按钮。
➢ 导入的轨迹文件格式每行需包含六个关节角,且单位为弧度。
➢ 导入的轨迹文件后缀需以.offt 结尾。
➢ 导入文件需复制到文件加下方能在 AUBOPE 软件界面下显示,复制目录为如
下图所示:

11.8 轨迹记录
记录轨迹可以实现在一段时间内对机械臂运动轨迹的记录,并应用到在线编程环境中。
新建轨迹:点击开始按钮后开始记录机械臂运动轨迹,点击完成按钮结束记录,在输入框中输入轨迹名称,点击保存后,完成轨迹记录。
轨迹回放:选中轨迹图标,点击界面中的加载,长按移动到准备点按钮,将机械臂移动至轨迹记录的初始位置,然后点击运行后,即可进行轨迹回放。
轨迹暂停:点击停止,会将回放中的机械臂暂停。
轨迹暂停后恢复:长按移动到准备点将机械臂同步到当前进度位姿后,点击运行,即可恢复轨迹回放。
间隔时间:轨迹记录时间单位为每个路点 100ms,间隔时间的含义是用多少时间播放这 100ms,例如将间隔时间设置为 50ms,则以 2 倍的速度播放轨迹,若设置为200ms,则以 0.5 倍的速度慢放。
轨迹回放时,会通过滑块及进度条显示轨迹进度,用户也可以手动拖动进度条,对轨迹进行操作。
点击剪切头部,即可删除滑块所在位置之前的轨迹,点击剪切尾部,即可删除滑块所在位置之后的轨迹。
轨迹记录的时间区间为 2″~5′。

报错代码
遨博
遨博机器人
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









