





遨博机器人报错代码:底座和安装机器人本体
时间:2020-11-20
阅读:8643

6.4 安装机器人
6.4.1 底座
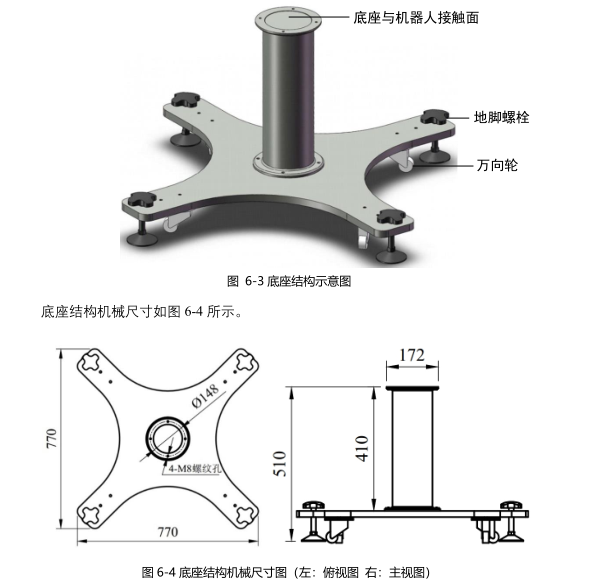
AUBO-i5 底座如下图所示。
底座带有 4 个地脚螺栓和 4 个万向轮,方便固定和移动。用户需要固定机器人本体时,旋转地脚螺栓上部,降下地脚螺栓;要移动机器人本体时,用工具(扳手)旋转地脚螺栓下部螺母,升高地脚螺栓使底座万向轮着地即可。
6.4.2 安装机器人本体
机器人具备 360°安装位置姿态自适应功能,可支持在底座上安装、吊装、壁装及其他特定安装方式,如图所示。
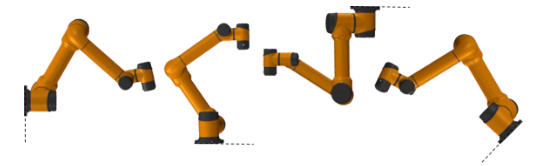
图 6-5 不同安装姿态示意图
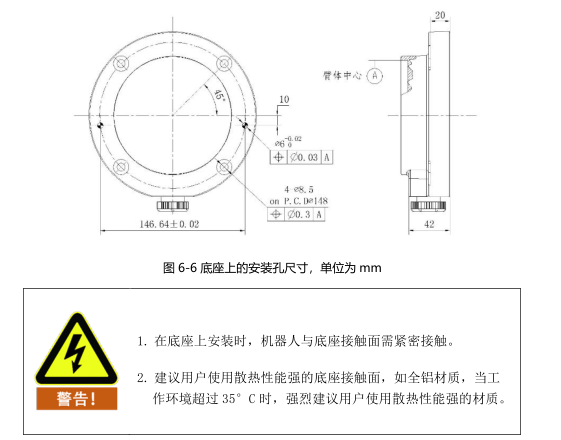
在底座上安装时,使用 4 颗 M8 螺栓将机器人本体固定在底座上,建议使用两个Ф6mm 的孔用来安装销钉,以提高安装精度,机械尺寸如图 6-6 所示。
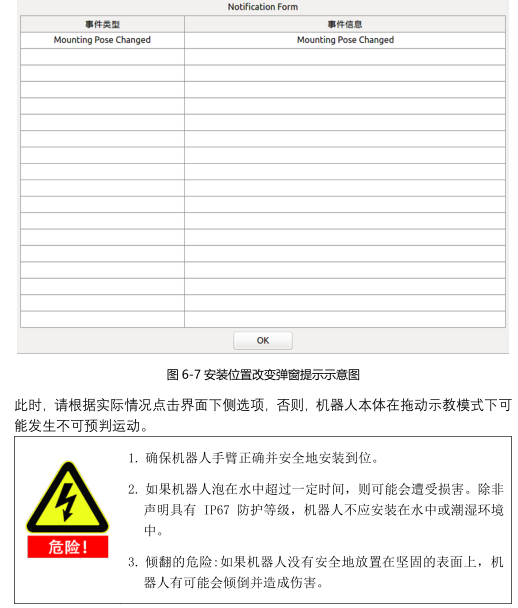
机器人本体常规安装方式为正装在底座上。当机器人改变了安装方式(如选用吊装、壁装等)时,示教器上电后,在初始化界面设置完毕后,示教器会弹出如下窗口:
报错代码
遨博
遨博机器人
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









