





机械手灵活掌控各种球体 执行与人类类似的抓握

抓握球体物体对于人类来说似乎是一项无意识的任务,但人类完成这个动作需要经过一个复杂的神经网络。现在,机器人正在使用人工神经网络来获得相同的功能,以灵活掌控各种球体。在最近的一项研究中,机械手通过三种不同的抓握动作“学习”以拾取不同形状和硬度的物体。
“人形机器人或受生物启发的机器人的编程非常复杂,” 德国卡尔斯鲁厄FZI Forschungszentrum Informatik的研究科学家Juan Camilo Vasquez Tieck说 。“而且传统的机器人编程方法并不总是适合利用其功能。”
Tieck说,传统的机器人系统必须执行大量的计算,才能跟踪轨迹并抓住物体。但是像Tieck一样的机器人系统(依赖于SNN)首先训练其神经网络,以更好地建模系统和物体运动。之后,它可以实时适应运动,从而更加自主地抓取物品。
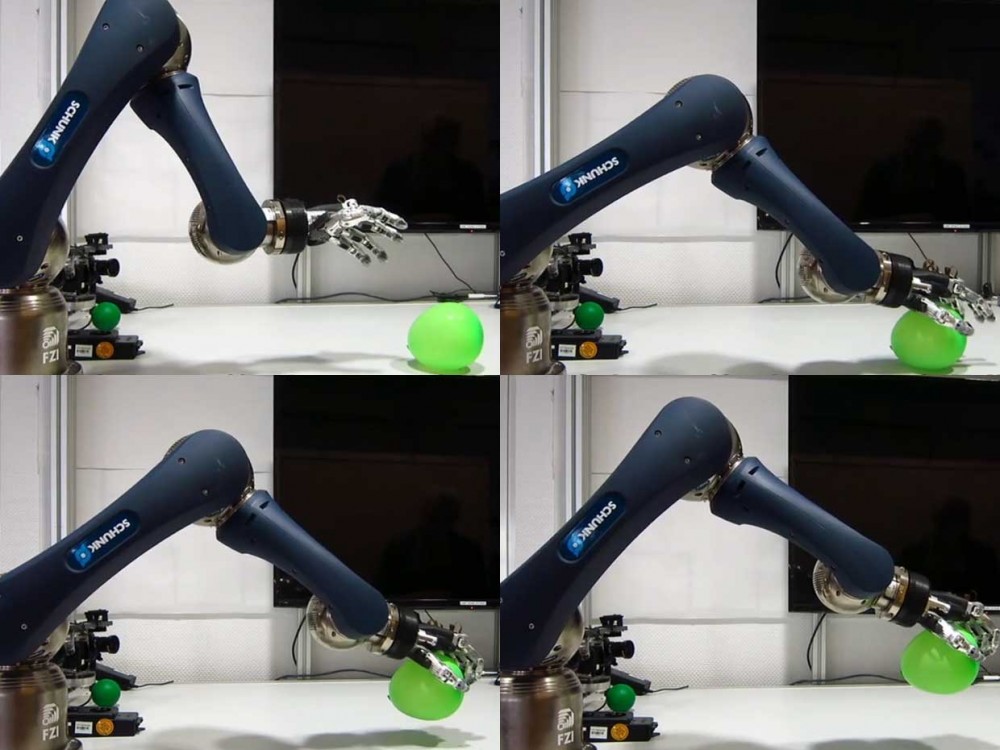
Tieck和他的同事们开发的新机器人系统使用了一种现有的机器人手,即Schunk SVH 5指手,其手指和关节的数量与人的手相同。
研究人员将SNN集成到他们的系统中,该系统分为几个子网。一个子网单独控制每个手指,使手指弯曲或伸展。另一个问题涉及每种类型的抓握运动,例如机械手是否需要进行捏捏,球形或圆柱形运动。
对于每个手指,神经电路都会使用电动机的电流和关节的速度来检测与物体的接触。当检测到与物体的接触时,激活控制器以调节手指施加的力。
蒂克说:“通过这种方式,通用抓握运动可以适应具有不同形状、刚度和大小的物体。” 如果物体移动或变形,该系统还可以快速适应其抓握运动。
10月24日发表在IEEE机器人与自动化快报上的一项研究中描述了机器人抓取系统。研究人员的机械手 在不知道其属性的情况下对物体使用了三种不同的抓握动作。目标对象包括 塑料瓶,软球,网球,海绵,橡皮鸭,其他气球,钢笔和纸巾包。研究人员发现,一方面,捏捏运动需要比圆柱或球形抓握运动更高的精度。
Tieck说:“对于这种方法,下一步是整合基于事件的摄像机的视觉信息,并将手臂运动与SNN集成在一起。” “此外,我们想用触觉传感器来伸出手。”
他说,长期目标是开发“一种系统,该系统可以执行与人类类似的抓握,而无需深入规划接触点或进行严格的稳定性分析,并且能够通过视觉和触觉反馈适应不同的物体。”

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2018-09-12 17:15:57
- 2018-12-24 12:45:04
- 2024-03-24 11:04:05
- 2022-10-31 11:29:12
- 2022-08-25 11:11:08
- 2023-08-16 13:15:03
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









