





遨博机器人报错代码:系统停止输入和系统紧急停止输入(常开)
时间:2020-11-25
阅读:8635

8.5.12 系统停止输入
用户可通过此接口,接收外部停止信号输入,控制机器人进入 1 类停机状态。此输入可用于多机协作状态下,通过设置一条公用紧急停止线路,与其他机器共享紧急停止。操作员可通过一台机器的紧急停止按钮控制整条线的机器进入紧急停止状态。用户可参考如下示例,两台机器共享紧急停止功能,该线路中系统紧急停止输出连接至系统停止输入接口。请参见下图。
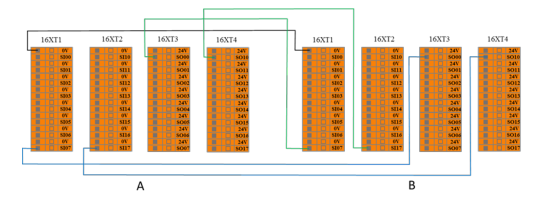
图 8-13 系统停止输入连接示意图
当其中一台进入紧急停止状态时,另一台也会立即进入紧急停止状态,实现两台机器共享紧急停止功能。
8.5.13 系统紧急停止输入(常开)
用户可通过此接口,当机器人进入紧急停止状态时,对外部输出紧急停止信号。
用户可参考如下示例,连接外部报警灯至系统紧急停止输出接口。请参见下图。
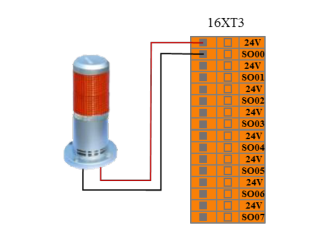
图 8-14 系统紧急停止输出连接示意图
此配置下,当机器人进入紧急停止状态时,对外部输出系统紧急停止信号,外部报警灯亮。
报错代码
遨博
遨博机器人
技术干货

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









