




Exyn无人机达到4A级自主权,可以自动创建3D地图

无人机的自主性越来越令人印象深刻,但是我们已经很难在现有功能上进行技术改进。诸如Skydio之类的公司正在出售廉价的商用无人机,这些无人机在跟踪您的同时可以快速动态地绕过障碍物进行路径规划,这非常了不起,它还可以自动创建结构的3D地图。
在这两种情况下,都有人间接参与其中,要么说“跟我来”,要么“描绘出这件事”。换句话说,自主飞行的水平很高,但是高层规划仍然需要一定的人员。

Exyn是一家总部位于宾夕法尼亚大学GRASP实验室的无人机公司,一直在开发用于检查大型非结构性空间(如矿山)的无人机。
这是一个极具挑战性的环境,它被GPS限制,黑暗,多尘且危险,仅举几个挑战。尽管Exyn的配备了激光雷达的无人机已经自治了一段时间,但它们现在完全可以在没有任何人类高层计划的情况下运行。
在Exyn称为4A级的这种自治级别上,操作员只需定义要映射的无人机的体积,然后从起飞到着陆,无人机将有条不紊地探索整个空间并自行生成高分辨率的地图,甚至如果它远远超出了通讯范围,则应这样做。
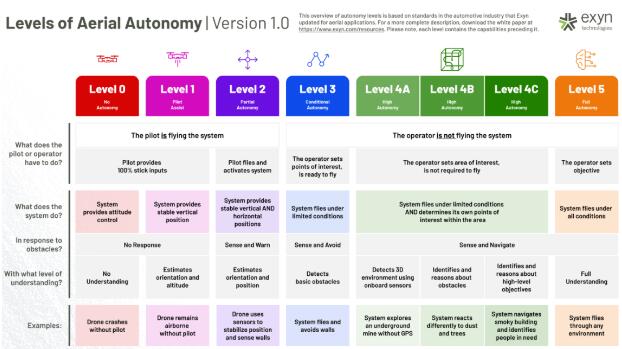
让我们具体说明“ 4A级”自治的含义,因为到目前为止,还没有真正确定无人机的级别。
公平地说,Exyn从SAE自治级别获得了灵感,因此这里肯定有一些先例,但是仍然需要记住,整个系统目前只是Exyn自己想出并应用于自己的东西系统。
关于Exyn到底在做什么:它们的无人驾驶飞机带有灯光、GoPro、强大的计算能力、更大的电池和旋转的Velodyne激光雷达,能够完全独立于操作员或任何种类的人进行操作完全没有外部输入。没有GPS,没有基站,没有通信,没有对空间的事先了解,什么也没有。

您告诉无人机您想在哪里进行地图绘制,然后它会起飞,然后自行决定在哪里以及如何探索它所在的空间,并在运行过程中建立一个令人讨厌的高分辨率激光雷达图,并不断扩展该地图直到它用完未开发的区域,然后它将按照地图返回家中并自行着陆。
当我们进行勘探任务时,我们要做的是找到可见和探索空间与未知空间之间的边界。然后,计算候选视点,这些视点是沿着该边界的位置,可以在这些位置推断传感器可以获取多少潜在信息,然后系统选择最有机会看到尽可能多的环境的信息。
Exyn的无人机以高达2 m / s的速度飞行,单次飞行可以探索1600万立方米(约9个足球场的容量),如果您要探索的区域大于该范围,则可以返回更换电池后进行更多回合。
但是,重要的是要了解这种无人机自主性的局限性。它可以感应诸如电源线之类的东西。
到目前为止,这并不是问题,因为它是“病理性”障碍的一个例子,这是不正常的事情,通常只有将其专门放置在此处以使您不知所措时才会遇到。以步行速度移动的动态障碍物(例如人或车辆)也很好。尽管无人机可以识别出空气中过多的灰尘,但有时灰尘还是很棘手的,在更新其地图之前,它会稍等一会儿灰尘才能沉降下来。
完全无需人工干预的系统的商业应用非常清楚,它能够自动生成几乎不受约束的空间的详细激光雷达图。但是我们最兴奋的是潜在的搜索和救援用例,尤其是当Exyn开始让多架无人机协同合作时。您可以想象这样一种情况,您需要在山洞或地雷中找到一个迷路的人,然后在入口处卸下几架无人机,然后让无人机展开所搜。
为了实现这一点,Exyn需要对他们的系统增加额外的了解,这是他们现在正在努力的事情。这意味着既要了解对象是什么,也要对它们进行推理,这可能意味着对象在更抽象的意义上代表什么以及动态障碍之类的事物可能如何运动。自动驾驶汽车必须定期执行此操作,但是对于尺寸和功率受限的无人机而言,这是一个更大的挑战。

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
满载实力 大展宏图!165kg/210kg大负载机器人登场
关键字: 大负载机器人 2025-07-29 -
燃爆世界人工智能大会丨雷赛“20自由度”灵巧手方案首秀
2025-07-28 -
他山科技多款新品亮相 WAIC 展会,展现机器人触觉技术新成果
关键字: 他山科技 2025-07-28 -
更懂机器人的灵巧手 | RH56F1系列惊艳首秀WAIC!
关键字: 灵巧手 因时机器人 2025-07-28 -
极致清晰!海康机器人发布2.45亿像素XoFLink光口相机
关键字: 海康机器人 2024-12-05
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-05-19 10:19:58
- 2019-11-20 11:04:22
- 2021-05-19 10:19:58
- 2019-07-10 15:03:27
- 2025-07-29
- 2025-07-28
- 2025-07-28
- 2025-07-28
- 2024-12-05
- 2024-12-03
- 2024-10-16
- 2024-10-11
- 2024-09-19
- 2024-09-13









