





【梅卡曼德】梅卡曼德合作伙伴推出全自动机器人装卸车解决方案

饲料、粮食、化肥、食糖、面粉、化工等领域货物运输量大,涉及大量装卸车需求。长期以来,装卸车多由人工完成,存在强度大、效率低、装卸数量易出错等问题。
针对装卸车场景痛点需求,梅卡曼德合作伙伴推出全自动机器人装卸车解决方案。方案搭载了3D视觉引导拆垛、高精度定位车辆、装载垛型自动规划、机器人路径自动规划等先进技术。实现复杂场景下自动化装卸及柔性化协同,大幅提升装卸车效率。
应用难点
人工装卸(图片源自网络):

货物自重大(通常在30kg~50kg不等),人工装卸强度大、存在作业风险、效率低且不稳定,难以满足企业整体生产需求。
车辆入库位置随机、车身尺寸不一,需对车辆位置、尺寸进行精准识别;不同车辆栏边高度不一,系统需自动规划无碰撞运动路径。
客户对成本管控严格,期待能够充分利用车斗空间,节约运输成本。
涉及车型、货物种类众多,需系统具备良好的兼容性。
解决方案
01工作流程
装车现场:

货车到位,系统自动定位车辆,获取车辆尺寸、位置信息。
系统发送信号给3D视觉系统,同时3D视觉系统引导机器人抓取待装车货物。
系统进行垛型规划,机器人随滑轨移动,按规划将货物精准码放于车斗内。
重复上述流程,直至整车装完。
卸车则由机器人从车斗中逐一抓取货物并放置于指定位置,直至卸车完成。
02方案优势
系统定位精度高,精准定位车辆、码放位置,支持垛型监测
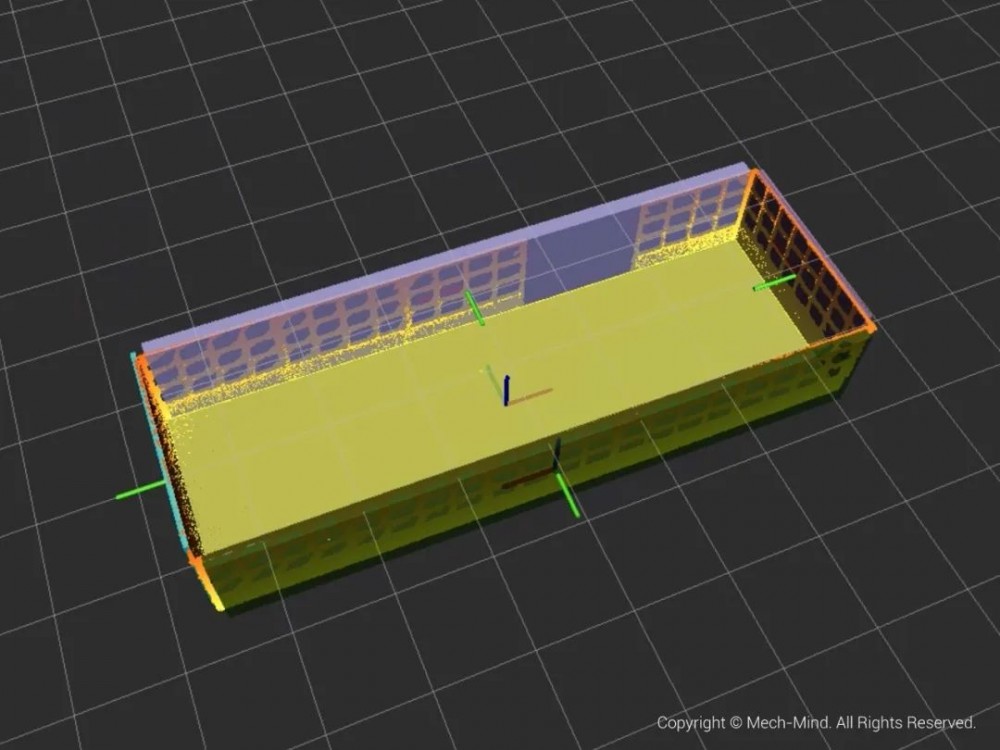
高精度定位车辆位置,支持车辆随机入库,无需固定车辆入库位置;自动获取车身尺寸数据,以此进行装车垛型规划,实现精准装卸。
上料位3D视觉系统引导机器人精准抓取来料货物。装车位3D视觉系统高精度定位码放位置,实时监测垛型,对码放异常的情况进行报警,提升垛型稳定性。
自动垛型规划,充分利用车斗空间,高效稳定

自动垛型规划,根据订单信息及车辆位置、尺寸,生成对应码垛策略。充分利用车斗空间,避免货损,大幅提高装载率。
单台机器人每小时可处理1200件货物,节拍满足客户运输需求。
灵活度高,多品种装卸、多车型兼容
多品规物料兼容,根据客户生产需求,实现新增SKU的快速、精准识别。
适配平板车、低栏车、高栏车等多种不同车型,满足客户不同场景下的装卸车需求。
自研夹具+运动规划,稳定装卸
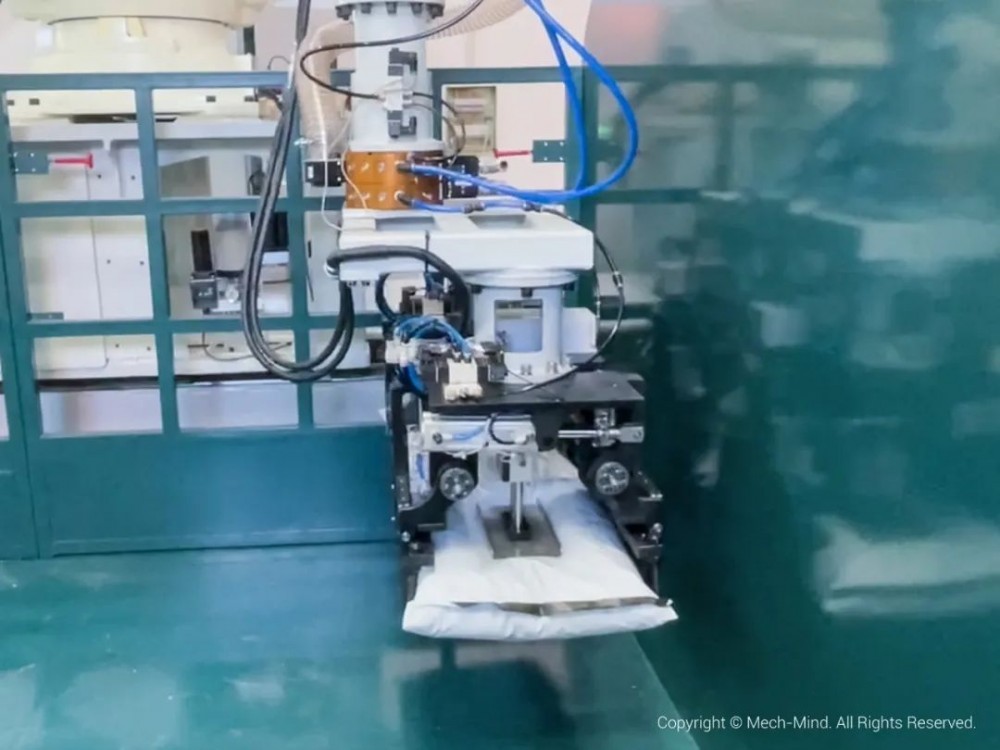
夹具可灵活应对不同栏高的车辆,贴边打开将货品稳定放置,避免掉落炸包。
系统自带夹具库,夹具快速自动切换,实现多SKU自动化装卸。
自动规划机器人运动路径,实时动态避障,装卸过程更安全、更稳定。
部署便捷高效,柔性、智能装卸
自研智能装卸车软件,实现不同装卸场景下的灵活部署。
支持与AGV、叉车等设备及WMS系统柔性对接、托盘库自动回收及释放,完成闭环自动化装卸。
机器人随滑轨移动,充分覆盖尺寸较长的车辆;一站式装卸车工作站安装部署灵活,提升场地利用率。
此次梅卡曼德合作伙伴发布的自动装卸车解决方案,具有定位精度高、装卸稳定高效、部署灵活便捷等优势。进一步突破了视觉技术应用边界,提高企业末端物流运输效率。

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

梅卡曼德(北京)机器人科技有限公司
 5年
5年



- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









