





SCARA机器人机械结构参数计算说明 上
时间:2017-06-09
阅读:27423
原创

在结构分析设计、电机和材料选择以及总体设计方案确定后,便需对该SCARA机器人各零部件进行必要的指标计算,选择合适的型号。在本章中,主要介绍了步进电机的转矩、功率等指标的计算,并根据计算的结果选择合适型号的步进电机。根据需要的功率和转速以及载荷选择合适的齿数以匹配其他参数,并进行计算,根据所得结果选择符合要求的同步带型号。此外,还对抓手的设计进行计算,对机器人的强度进行校核,确保所优化设计的SCARA机器人符合安全要求。
步进电机的计算和选型
在本设计中,SCARA机器人各主要零部件的质量要求如下:底座质量≤15kg,第一关节(大臂)质量≤12kg,第二关节(小臂)质量≤6kg,第三关节和第四关节(末端执行器件)质量≤3kg。定义SCARA机器人第一关节、第二关节及第三关节和第四关节的转动惯量分别为JG1,JG2,JG3 ,按照平行轴定理,可以计算出绕SCARA机器人第一关节轴的转动惯量为:
3.1式中, l1, l2, l3分别为各平行轴中心到SCARA机器人第一关节轴的水平距离,根据前述章节的设计可知,这三个数值分别为200mm,400mm以及550mm。假定所设计的SCAR.A机器人第一关节的角速度从完全静止到达到30°/s所需要的时间为0.2s,则驱动机器人第一关节进行相应的旋转运动时,步进电机所需要的启动转矩的数值是:
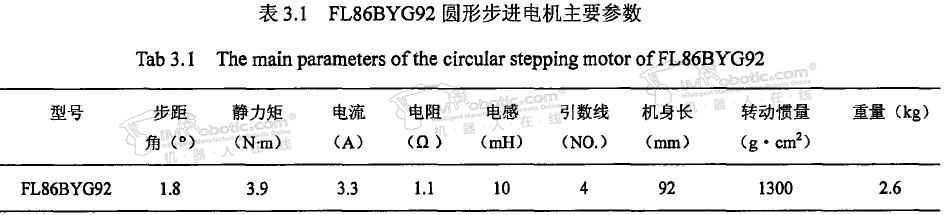
考虑到摩擦以及其他各方面因素的影响,取步进电机的启动转矩的数值为8N·m。此外,在本设计中取的安全系数值为2,即可得到步进电机的最小启动转矩为:
根据以上计算结果,并查询相关步进电机参数资料,我们选择由北京飞凌东泰电子技术有限公司生产的FL86BYG92圆形步进电机,其主要的规格参数如表3.1所示:
同样的,依据上面的计算方法,可计算出绕SCAR.A机器人第二关节轴的转动惯量为:
同理,假设SCARA机器人第二关节从完全静止到角速度达到30°/s所需要的时间也为0.2s,由此可以计算第二关节步进电机的启动转矩为:
与上文类似,考虑到摩擦以及其他各方面因素的影响,本设计确定的步进电机启动转矩为2N·m,并规定其安全系数为2,即可得到该步进电机的最小启动转矩是:
根据以上计算结果,并查询相关步进电机的主要参数资料,我们选择北京飞凌东泰电子技术有限公司生产的FL86BYG62圆形步进电机,其主要的规格参数如表3.2所示:

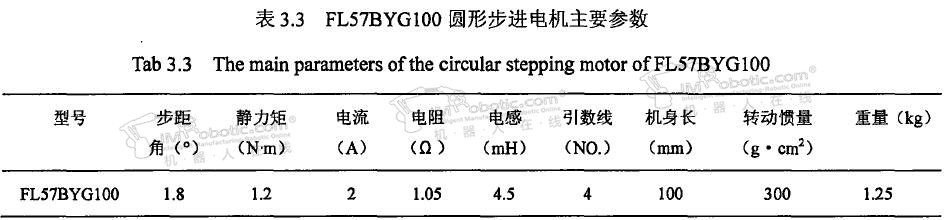
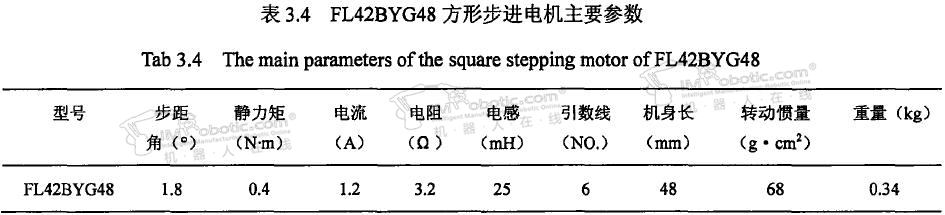
同理,可以根据相关计算,得出SCARA机器人第三关节和第四关节所用步进电机的主要参数及类型。通过查询相关的步进电机参数手册,我们亦可选择由北京飞凌东泰电子技术有限公司生产的两款步进电机作为SCARA机器人的第三关节和第四关节的驱动电机,它们的型号分别是FL57BYG100圆形步进电机和FL42BYG48方形步进电机,这两种步进电机的主要规格参数分别如表3.3和表3.4所示:
同步带的计算和选型
在本设计中,SCARA机器人第三关节处的机械传动是采用同步带进行传动。带传动从类型上来说是一种挠性传动,同步带传动的系统主要是由传动带和两个带轮构成,并且这种传动方式本身就具备了许多优点,如传动较为平稳,结构比较简单,价格也相对较低等,这些特点都非常符合本设计的设计指标及要求。
由3.1节可知,同步带的驱动电机是FL42BYG48圆形步进电机,该电机的转速为1500r/min额定功率为200w,传动比为1,选择一对直径为50mm左右的带轮,查阅设计手册取载荷修正系数Ka=1.5,即可得到带传动的设计功率为:
.jpg)
根据设计中的功率和转速要求,并参考同步带的选型图,可选取L型同步带,查阅资料可知此同步带的节距Pb=9.525mm,基准宽度的数值为25.4mm。取同步带的小带轮齿数Z1=20,即得到节圆的直径为:
进一步,可以得到外径的数值为:
同样的,取同步带的大带轮齿数Z2=20,同理亦可以算出大带轮的节圆直径数值为:
同理,我们得到大带齿轮的外径为:
通过计算可以得出同步带的速度为:
轴间的间距ao可以确定为:
也就是说ao的取值在82.7624mm到236.464mm之间。在本设计中,我们取a0数值为120mm。下面,则是确定同步带的带长L0以及同步带齿数Z的计算过程:
查阅设计手则,我们可以选取代号为200的L型同步带,此同步带的节线长度为431.8mm,节线上的齿数Z为50。故可计算出两同步带的间距a的数值为:
其小带轮和同步带啮合的最少齿数Zm计算如下:
而大带轮在稳定工作时的输出功率计算如下:
同步带的宽度为
.jpg)
通过查询相关设计手则,我们选取的标准带宽代号为050,则设计的SCARA机器人同步带型号为200L050。
抓手设计计算
(1).jpg)
在设计抓手的驱动装置、传动机构以及抓手的机械结构时主要依据是SCARA机器人的抓手在握持住物体的时所需要的夹紧力。因此,必须对抓手夹紧力的大小、方向以及作用点进行一定的分析,并进行相应的计算。在进行抓手夹紧力分析时,需要注意抓手的夹紧力既不能过大,也不宜过小。如果SCARA机器人抓手的夹紧力过大,被抓取的物体可能会发生一定的变形,并且可能导致抓手的整体结构变大、浪费动力,降低整个SCARA机器人的工作效率;如果SCARA机器人抓手的夹紧力过小,将会使得手部无法握紧物体,或者在抓取完物体后进行移动的过程中发生脱落。为此,需要根据具体的设计要求去改变SCARA机器人抓手的夹持方式,或在机器人抓手的机械结构上采取一定的措施,以降低所需的夹紧力。如图3.1所示,是SCARA机器人抓手简图。
SCARA
SCARA机器人结构优化设计及运动学仿真
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-04-12 18:24:02
- 2023-05-02 21:14:05
- 2023-05-08 17:22:00
- 2022-12-01 14:01:36
- 2023-02-02 10:09:54
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









