





SCARA机器人机械结构参数计算说明 下

下面将对SCARA机器人抓手的夹紧力进行计算分析。设抓手的抓握力为P,前文提到机器人所抓取物体的上限质量为1kg,现假定摩擦系数u为0.25,则由重量W≤P·u可以得到1 ≤P·0.25,所以有P≥4N。而对于实际的夹紧力,还需要考虑安全系数、工作情况系数以及驱动效率等因素,因此,根据![]() ,其中K1为安全系数,通常的数值为1.2到2.0之间:K2为工作情况系数,主要考虑的是惯性力的影响,可近似按式K2=1 +b/a来计算其数值,其中
,其中K1为安全系数,通常的数值为1.2到2.0之间:K2为工作情况系数,主要考虑的是惯性力的影响,可近似按式K2=1 +b/a来计算其数值,其中![]() ,其意义是重力方向上的最大上升加速度,Vmax则是SCARA机器人运送物体时的最大速度,t响为系统从静止达到最大速度的响应时间,其数值一般选取在0.03s到0.5s之间。设F为驱动力,则
,其意义是重力方向上的最大上升加速度,Vmax则是SCARA机器人运送物体时的最大速度,t响为系统从静止达到最大速度的响应时间,其数值一般选取在0.03s到0.5s之间。设F为驱动力,则![]() ,其中,
,其中,![]() 为螺纹倾斜角,P为摩擦角。如果转动螺旋的转矩为T,那么转矩T与拧紧力P的关系为
为螺纹倾斜角,P为摩擦角。如果转动螺旋的转矩为T,那么转矩T与拧紧力P的关系为![]() 。对于SCARA机器人手爪驱动电机的选择,假定前端手指的质量为0.2kg螺纹的导程Ph=1mm,当机器人空载时,工作台折算到电机轴上的转动惯量数值为:
。对于SCARA机器人手爪驱动电机的选择,假定前端手指的质量为0.2kg螺纹的导程Ph=1mm,当机器人空载时,工作台折算到电机轴上的转动惯量数值为:
![]()
在最大的工作载荷下,工作台折算到电机轴上的转动惯量数值为:
![]()
当机器人快速空载启动时,电动机转轴所承受的负载转矩Teq1为:
![]()
3.21式中,Tmax表示机器人在快速空载启动时,折算到电动机转轴上的最大加速转矩,而Tf则表示移动部件在运动时,折算到电动机转轴上的摩擦转矩:
![]()
在最大的工作负载状态下,电动机转轴所承受的负载转矩Teq2:
![]()
3.23式中,Tt代表折算到电动机转轴上的最大工作负载转矩:

由上面两式的结果可知,最大工作负载状态下电动机转轴所承受的负载转矩Teq2的数值为![]() ,从而可以得到Teg:
,从而可以得到Teg:
![]()
步进电机的最大静转矩为:
![]()
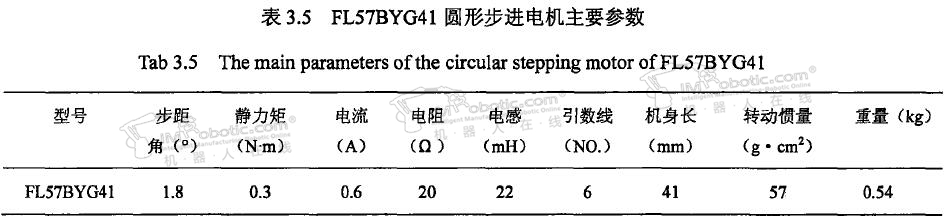
通过查询手册可知,可以选用北京飞凌东泰电子技术有限公司生产的FL57BYG41圆形步进电机,其中Tjmax=0.6N·m,能够满足SCARA机器人的设计要求。FL57BYG41圆形步进电机的主要规格参数如表3.5所示。
强度校核
我们需要关注SCARA机器人工作过程中的强度,以确保安全运行。本节对SCARA机器人进行简单的强度校核,确保其在规定的工作量程内,可以正常工作,不会出现强度失效的问题。如图2.1所示的SCARA机器人的参数如下:第一关节长度为200mm,第二关节长度为175mm,电机1质量为2.6kg,电机2质量为1.6kg,电机3质量为1.25kg,电机4的质量为0.34kg,电机5的质量为0.54kg,第二关节质量≤6kg,第三关节和第四关节总质量≤3kg。由结构不难发现,只要大臂不发生强度失效,整个系统就会安全。现对SCARA机器人的大臂做一个简单校核。大臂采用的材料是铝合金,取铝合金的密度为2.8g/cm2。通过估算可得大臂所承受的质量约为18kg,加上被抓取物体的最大重量1kg以及其他机械零件的重量,为安全起见,取大臂最终承受的重量为25kg。而重心距离支撑底座约为205mm,因此,大臂所承受的弯矩M为:
![]()
大臂的抗弯截面系数W:
![]()
对大臂进行弯曲应力校核:
![]()
查阅资料可知,铝合金的抗拉强度最小在200MPa左右,因此,大臂符合强度校核的标准。同理,对机器人的其他部件进行类似的校核,也可以发现均符合标准,故所优化设计的SCARA机器人强度符合要求。

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-04-12 18:24:02
- 2023-05-02 21:14:05
- 2023-05-08 17:22:00
- 2022-12-01 14:01:36
- 2023-02-02 10:09:54
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









