





喷涂机器人世界坐标系统与基坐标系统

世界坐标系(Worldcoordinatesystem)也称为大地坐标系或者全局坐标系。喷涂机器人正如第二章中所提的那样,在一个完整的离线编程控制工作站(Station)中,除了机器人这个主角外,还有机器人控制柜,隔离栏,电气管路,工件输送链,PLC系统以及一些其他用户定义的可运动的机械装置。这些外围设备并不与机器人本体关联,其位置信息和行为描述都可以通过世界坐标系来刻画。从这个角度来说世界坐标系是坐标系系统最底层的坐标系。基坐标系(Basecoordinatesystem)是指机器人基座位置定义的坐标系,机器人的工具坐标系或者用户自定义在机器人本体上的用户坐标系(Usercoordinatesystem)都是以基坐标系作为上一级参考坐标系的。而基坐标系则以世界坐标系作为上一级参考坐标系。当然这就决定了在一个工作站中只有一个世界坐标系,而基坐标系可以多次定义。当有多台机器人或者同一台机器人安装在工作站的不同位置就会需要多次定义基坐标系。如图4.1所示。
.jpg)
图4.1中坐标系WORLD即为世界坐标系,坐标系Rob-1、Rob-2即为基坐标系。世界坐标系WORLD必须唯一存在。
工具坐标系统
工具坐标系是用来描述当前机器人第六轴末端工具位姿特性的坐标系。在机器人第六轴末端未加载任何工具时,默认状态下的初始机器人工具坐标系位于第六轴末端法兰的中心,通常称之为腕坐标系(Wristcoordinatesystem)。当在第六轴法兰上加载喷枪工具对象后,离线系统会根据工具对象的CAD数据,物理重心,工具质量等一系列信息计算出从初始腕坐标系到工具对象坐标系的位姿偏移。从而更新当前工具的工具坐标系(Toolcoordinatesystem)。此时的工具坐标系是以机器人基坐标系作为上一级参考坐标系的。如下图4.2所示,腕关节坐标系XYZ偏移到了工具坐标系![]() 。
。
.jpg)
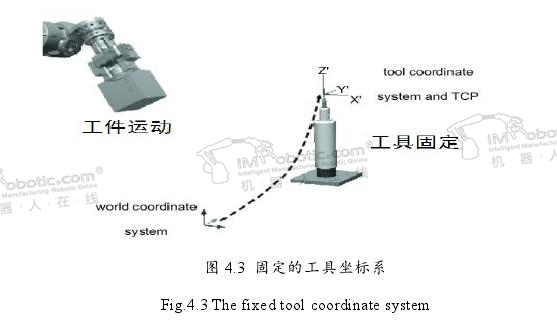
上述的这种情况是工具加载在机器人本体上进行作业。当然,还有一些情况要求工具对象是独立固定于于机器人本体之外的(如某些点焊、切割和打胶工艺)。这时工具坐标系的定位通过世界坐标系(Worldcoordinatesystem)的偏移来获得,如图4.3所示。
事实上,更普遍的情况是:我们只拥有工具的对象的CAD模型却没有工具对象精确的重心和质量信息。这时工程上常采用四点法或者六点法来寻找工具对象末端TCP的位置。四点法操作如图4.4所示。
.jpg)
这种方法的思路是让机器人工具末端指向一个重定位尖端,在不改变机器人工具末端位置的前提下不断改变机器人姿态,并记录下来(相当于让机器人做多次重定位运动)。然后利用机器人正运动学知识解出工具末端位置。理论上四点法记录四次姿态信息己经能解出姿态方程组的解,但出于精确度的考虑会用六点法记录六次姿态信息。 在RAPID离线编程中对工具坐标数据有完善的声明格式,以某把喷枪工具声明为例:
PERStooldata!声明数据类型为工具坐标系数据

其中数据结构中的第一个bool型关键字只能取TURF或FALSE,当取TURE时表示当前工具加载在喷涂机器人本体上;当取FALSE时表示当前工具独立于机器人本体外。这与上述的两种讨论情况相对应。第二个Position数组中存放了当前工具TCP相对于腕关节的各坐标偏离值,描述了工具TCP的位置变化。第三个(Orientation)[q1,q2,q3,q4]态旋转信息数组描述了工具TCP的姿态变化,其具体定义意义会在下文中介绍。后续的数据主要是工具对象的中心偏移和质量等信息,这里不再赘述。

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









