





喷涂机器人RAPID中的数据结构

RAPID中的数据结构 关节目标常量(CONSTjointtarget)的数据结构定义如下:
CONSTjointtargetpos_O1:=[[a1,a2,a3,a4,a5,a6],[e1,e2,e3,e4,e5,e6]];
其中数组[a1,a2,a3,a4,a5,a6]值也就是喷涂机器人本体六个关节的实际值(对于旋转关节存放的是角度值,对于线性关节存放的是线度值。);而数组[e1,e2,e3,e4,e5,e6]中存放的是目标点位置机器人的逻辑轴关节值(即通常所说的外轴关节值);在机器人的系统参数定义中,六个物理轴和六个逻辑轴的定义是逐一对应关联的,所以从这个意义上来说六自由度机器人实际可以受到“十二轴”控制。当外轴处于独立隔离模式时其系统约定编码为9E9。机械目标常量(CONSTrobtarget)的数据定义结构如下:
.jpg)
其中,[d1,d2,d3,d4]的值一般取-5到5之间的整数。一般情况下当d1,d2,d3,d4的值越接近0时表示机器人在轨迹目标点运动时的关节变化跨度越小,机械开销也越平滑,在运动过程中发生运动转角路径故障的可能性也就越小。以轨迹点Target-10的[d1,d2,d3,d4]配置和效果为例,其界面如下图4.14所示:
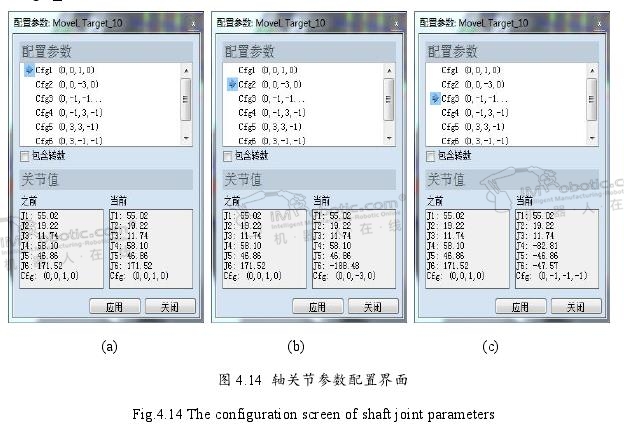
从图4.14中可以明显的看出上一个目标点的[d1,d2,d3,d4]配置为[0,0,1,0](a)中当前点配置为Cfg1[0,0,1,0],机器人六轴的角度值没有发生偏离;而在(b)、(c)中分别配置为Cfg2(0,0,-3,0)和pCfg3(0,-1,-1,-1),可以明显观察到当前机器人关节值和之前喷涂机器人关节值相比己经发生了不同程度的偏移。
为了对旋转姿态信息数组(Orientation)[q1,q2,q3,q4]]的定义进行更好的说明,给出如下一些解释。在目标点位置不变的前提下,目标点的旋转姿态坐标系(Rotatedcoordinatesystem)嘞对于参考坐标系(Referencecoordinatesystem)生了旋转重定位运动,如下图4.15所示。
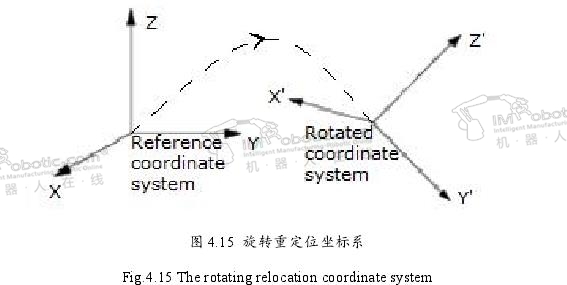
假设在Rotatedcoordinatesystem中在Referencecoordinatesystem中的向量表达记为:
.jpg)
因此从上述定义易得,当orientl:=[1,0,0,0];时表示未发生任何姿态旋转运动。

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









