





喷涂机器人的离线编程输送系统

在工业4.0的自动化大生产背景下,生产作业主要是在流水线上完成的。应该说在大多数情况下,喷涂机器人作业的工件对象是运动的。工件对象有的是在输送链上,有的是在变位机上,有的是做直线运动,有的是做旋转运动。这就决定了在工件上设置的编程目标点和编程轨迹也是随之运动的。这就需要喷涂机器人能“跟踪”工件对象。而RAPID离线编程的目的就是为了提高机器人的跟踪精度,并且精准推算出最佳的输送速度(即工作节拍)。在完成任务的前提下尽可能保证生产效率。承接上文中坐标系系统和运动指令系统讨论的基础,下面展开对输送系统的讨论。
生产现场的机器人系统和输送链系统非常复杂。为了叙述简明,将喷涂机器人一输送链模型抽象为如图4.16所示。
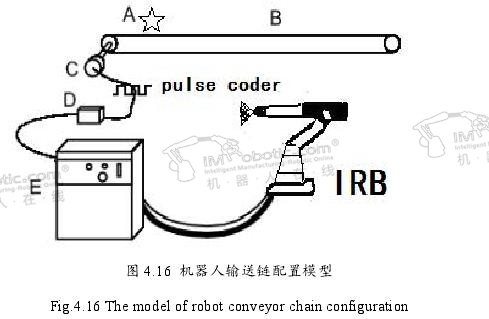
其中A位置为机器人与输送链的同步位置,在这个位置往往会安装一个光栅门触发器。工件在没有经过A位置时不被机器人识别,一旦工件经过A位置触发光电信号就会被机器人识别跟踪。B为输送链本体(conveyor)。C为编码器(pulsecoder),其将当前输送链传动速度转化为一系列占空比固定的方波信号。D为A/D转换接口。E为机器人控制柜。IRB为ABB的IRB系列涂装机器人。
在RAPID离线编程语言中描述的输送链对象中有几个关键参数如图4.17所示。
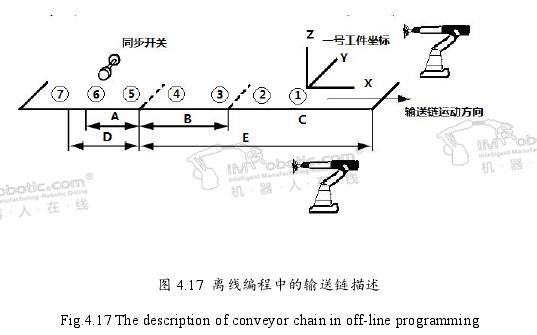
在图4.17中共有7个编号的工件依次放于输送链上。其中同步开关为输送链同步位置,当工件经过同步位置时即会触发同步信号;C为机器人操作区,一号工件坐标为当前机器人操作的工件对象的工件坐标系。B为操作准备区,B区内的所有工件都处在被跟踪状态。当机器人操作完C区的1号工件后会首先去B区寻找下一个待操作的跟踪工件对象,也就是3号工件。而2号工件此时己经离开了B区,因而将会被机器人忽略。A为工件间同步最小间距区,假设A区为300mm,而5、6、7号工件的间距为150mm,那么经过A位置时只有5、7号工件被同步,6号工件将被忽略。D为待追踪队列区域。E为总工作区,如若1号工件在离开E区时机器人对其的操作还未完成,系统也会强制断开机器人与工件的连接而返回D区寻找下一个操作工件。设置E区的目的一方面是处于控制单个工件的工时以提高生产效率,另一方面E区一般在机器人安全可达范围之内,可以确保机器人的操作安全。
当然,上面论述的是输送链的物理空间布局。而在机器人和输送链一起协同操作时,主要还是通过离线编程系统中预定义的坐标系系统进行各个目标位置参数的关联和表达的。因为输送链是在不断传动的,所以在这个过程中本章之前论述的坐标系系统之间的关系也是动态变化的,如图4.18所示。
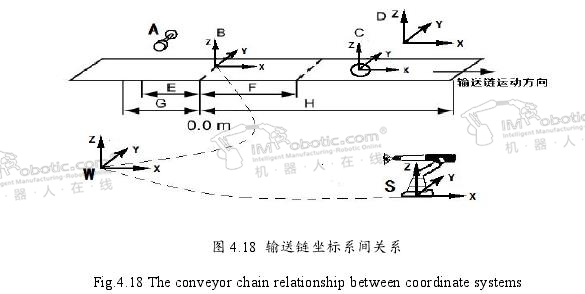
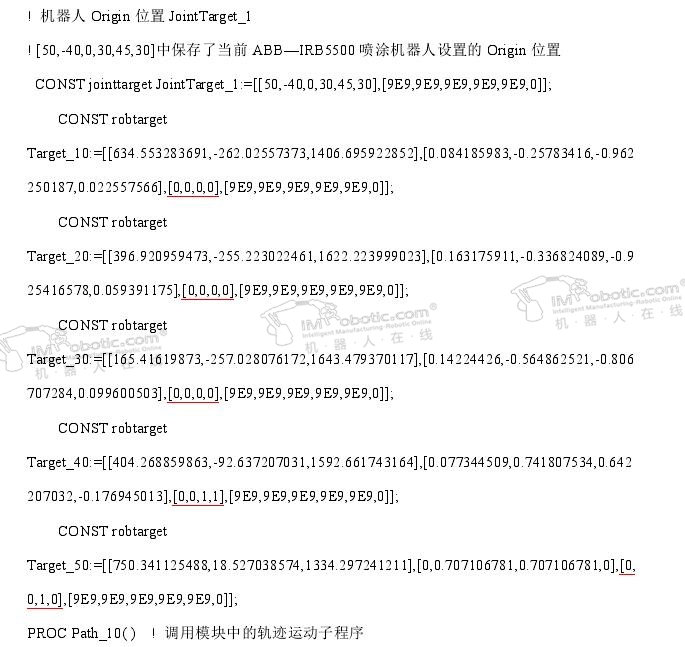
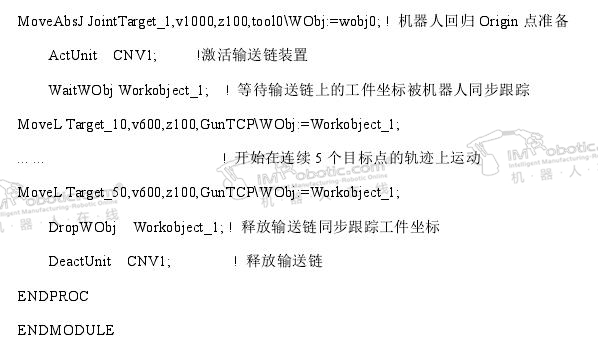
根据上图中描述和之前章节中对离线系统坐标系的讨论。A依旧是同步位置。E是工件最小间距。G为待跟踪队列距离。B为输送链的基坐标系,而S为机器人基坐标系,B和S的位置信息都是在世界坐标系W中表达的。通常情况下默认设置在输送链的起点位置(即零点)。在之前的讨论中可知,工件坐标系统由用户框架C和对象框架D构成。其中C定位了工件的当前位置,而工件上所有轨迹目标编程点的坐标由D表示。当工件经过A时被机器人系统同步。而当工件经过B时结合RAPID程序中的输送链坐标跟踪指令WaitWObj,此时在系统内部会将静止的S与不断在输送链上运动的C、D关联;而当喷涂机器人对工件的操作结束或者工件离开总工作区H的范围时,再结合RAPID程序中与WaitWObj相对应的解除坐标系关联指令DropWObj来释放当前跟踪的工件坐标系。然后再等待下个被跟踪的工件坐标系,如此循环往复。基于上述所论述内容,在离线程序中的实现程序片段形式如下:
.jpg)

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









