





喷涂机器人离线编程系统的实际工程测试

为了验证本章所研究的喷涂机器人离线编程技术要点的有效性和实用性。采用某汽车企业西南生产基地(重庆)目前正在投产的一款SUV商用车型来进行机器人离线编程的实际工程测试。离线工作站中共有四台机器人,全车的喷涂轨迹点达到了642个。考虑到篇幅有限,为了说明问题,故从涂装机器人喷涂轨迹中随机连续采集50个离线编程轨迹点作为测试数据点。50个采集轨迹点在车身构成的连续轨迹如图4.19所示。结合第三章中软件平台估计数据和企业的工艺要求,喷枪运动速度为890mm/s,喷涂轨迹间距为245mm。
.jpg)
当机器人由离线程序控制运动时,将机器人六个关节轴在各轨迹点处的运动角度值导出,记录于下表4.1中。
.jpg)
.jpg)
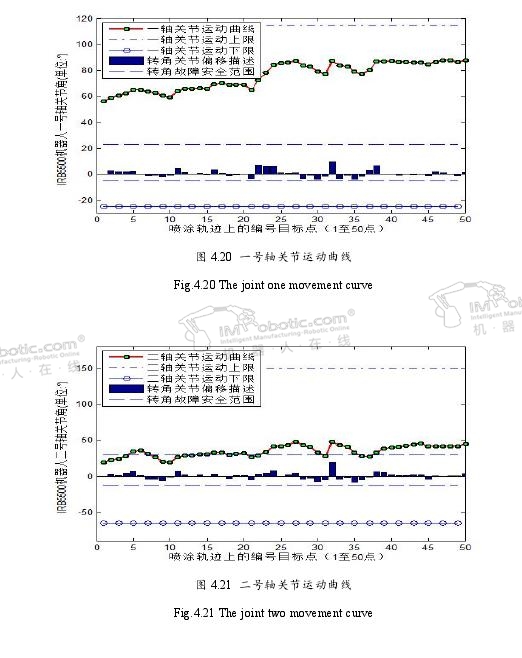
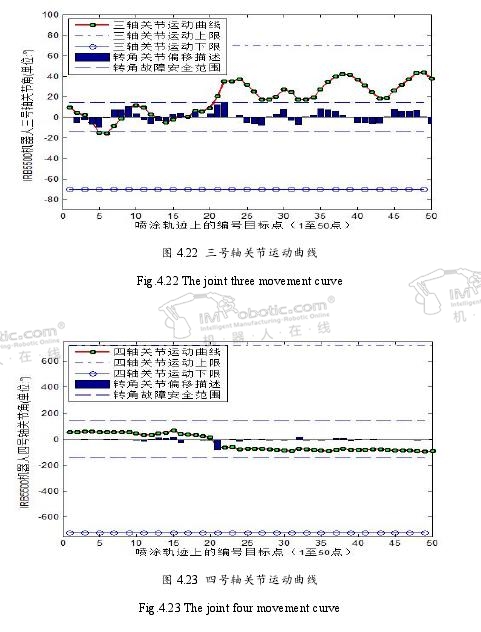
通过上表中监控机器人在离线环境中各个轴的运动数据,在Matlab中生各个轴关节相应的运动轨迹,如图4.20图4.25所示。
.jpg)
上述折线图刻画了轴关节的运动过程。在轴0度位置分布的柱状图为关节的转角偏移描述,由当前轨迹点的轴关节值与上一轨迹点的轴关节差值所得。柱状图的方向表示轴关节值的增减,柱状图的幅度表示轴关节值变化的幅度。在工程上通常将轴关节运动的上极限和下极限各取20%来构成转角故障安全范围。
在图4.20图4.25中可以明显看出喷涂机器人的各关节轴都在轴极限范围内运动;同时各轴在各轨迹点处的变化幅度也完全处于安全范围之内。这表明当前离线程序中配置的机器人轴关节运动数据不仅能良好的完成作业任务,同时在喷涂轨迹上运动时各轴运动“柔性”较佳,不易出现机械跳变和更加危险的机器人“乱舞”。
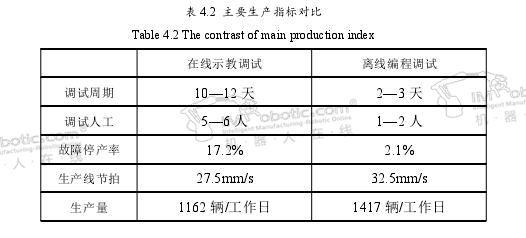
同时对同一款新车型的调试对比说明,离线编程调试较传统的在线示教调试拥有更好的性能指标和经济效益。如表4.2所示。
4.7本章小结
本章着重从喷涂机器人的坐标系系统,轨迹控制,程序指令,输送装置同步这几个离线编程的关键问题出发进行研究。将离线编程关键技术的研究内容应用于实际工业生产中,获得了较为理想的效果。相较于在线调试技术而言,比较明显的突出了离线编程技术调试高效、运行安全、控制精确、经济效益良好的优势。

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









