





基于机器视觉的面粉袋码垛机器人研究中拾取手爪设计

第3章拾取手爪设计
3.1引言 拾取手爪作为码垛机器人的末端执行机构,是码垛机器人的一个重要组成部分,它可以完成物品的抓取、搬运和码放等作业,其整体的性能、结构和质量等因素直接决定着码垛机器人码垛作业质量的高低,甚至抓取的成败。本文在参考常用的搬运码垛末端执行机构的基础上,设计了用于面粉袋码垛的面粉袋拾取手爪。 3.2手爪参数和结构设计 3.2.1手爪的工作参数 需要被码垛的面粉袋外形规格尺寸为540mmX360mmx 120mm(长、宽、高),面粉袋重量为25kg。面粉袋位于平面皮带式输送线的末端,拾取手爪需在机械臂的带动下,移动到面粉袋所在位置,通过手爪将平面上的面粉袋抓起。在抓取的过程中要保证安全可靠,不能出现面粉袋的撕裂、破损和面粉袋滑落等情况。 面粉袋相对于其它物品较软,在抓取的过程中容易发生变形,并且其在宽度方向的变形比长度方向的变形小很多,所以拾取手爪选择从宽度方向进行抓取。 3.2.2手爪的结构设计 目前,在搬运码垛作业中比较常用的末端执行结构有叉形机构、夹板机构、真空吸盘机构和转盘式结构,如图3.1所示。

其中,叉形机构主要应用于外形相对柔软且搬运过程中容易变形的袋装物品的抓取与码垛作业,夹板机构主要适用于外形整齐且在作业过程中变形小的箱装物品的搬运与码垛作业,真空吸盘机构主要应用于板状和型材物品的搬运作业,转盘式结构更多的应用于桶状物品的搬运作业。
面粉袋属于软包装物品,在搬运和码垛过程中容易出现撕裂、破损、变形和面粉袋位置变化等情形,所以不宜采用夹板、真空吸盘等末端执行器。目前,应用于袋装物品码垛的叉形机构末端执行器,其工作的条件是建立在袋装物品放置于滚筒输送线上的基础上,手爪的叉形结构手指可以通过滚筒之间的间隙放置于袋装物品的底部,然后合并叉形手指将袋装物品抓起,完成搬运动作。而本文所要搬运码垛的面粉袋是放置在平面皮带式输送线上,故叉形机构的末端执行器不能满足本课题的需要,其抓取的末端执行机构需要根据面粉袋的特点专门设计。
为此,本文设计了一种用于平面皮带式输送线上面粉袋搬运与码垛的拾取手爪,在SolidWorks三维环境下绘制了其三维模型,如图3.2所示。
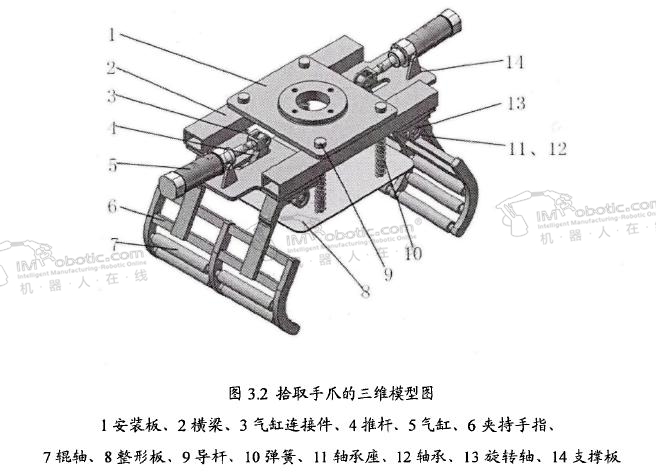
码垛机器人拾取手爪的工作原理,当两端气缸的活塞杆全部伸出时手爪的夹持手指全部打开,手爪移动到需要抓取的面粉袋位置时,气缸活塞杆缩回,此时夹持手指的末端首先接触到面粉袋的底部,面粉袋在手爪的夹持力下会发生变形,但其变形是有限的。当夹持手指进一步合拢的时候,面粉袋的底面会带动夹持手指上的辊轴旋转,使面粉袋更容易进入手指合拢区内部,面粉袋在滑入手爪内部的过程中有可能两边进入的快慢不均匀,造成面粉袋两边倾斜的情况,此时进入过快的一边将最先接触到手爪上的整形板,整形板在弹簧压力的作用下会阻止其进一步的快速运动,在一定程度上对面粉袋的倾斜进行校正。当手爪合拢到极限位置之后,面粉袋被完全抓起,上面的整形板完全压在了面粉袋上,对面粉袋起到了固定的作用,防止其在搬运的过程中滑落。面粉袋被搬运到码放位置时,气缸活塞杆伸出,面粉袋滑落到堆垛上,辊轴的旋转不仅使面粉袋容易滑落而且不容易使面粉袋划伤。
拾取手爪的动作过程只有开启和闭合两个动作,中间没有特别要求,所以它的驱动方式非常适合选择气动驱动,而且相比于液压、电动等其它的驱动方式,气动驱动具有动作迅速、夹持可靠,对环境的污染小,噪音低。气动还具有缓冲作用,对面粉袋的冲击破坏相对更小。


好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









