





基于机器视觉的面粉袋码垛机器人研究中手爪静力学分析(上)

3.3手爪静力学分析
码垛机器人静力学分析是研究结构在特定外力的作用下其结构的力学性能及变形情况。本文使用SolidWorks Simulation有限元分析软件对拾取手爪在抓起面粉袋的状态下进行线性静力学分析,检验拾取手爪在该状态下的应力、位移、应变以及安全系数等参数是否满足设计要求,也为拾取手爪的结构优化提供指导和参考。 Simulation作为Solidworks三维建模软件的组成部分,它是SRAC公司与SolidWorks公司合作推出的一款强大的有限元分析软件}s3}o SolidWorks中的三维模型可以在不做任何转化的情况下,直接在Simulation中进行各种有限元分析,极大的提高了产品的分析效率。 3.3.1手爪三维模型的建立 本文在SolidWorks三维环境中绘制了拾取手爪的三维模型,为了获得好的网格划分效果和缩短计算时间,需要对三维模型进行简化。模型的简化过程主要是去除分析中不重要的圆角和圆边,去除螺栓和螺钉连接,将轴承替换为同种材质的圆柱环,去除整形板、导向柱和弹簧,简化后的模型如图3.3所示。

3.3.2定义材料属性和边界条件
(1)编辑材料属性
建立拾取手爪的三维模型后,需定义各零件的材料属性。为了减轻拾取手爪的整体重量,抬取手爪的主要材料选择硬铝,其牌号为2A 12,其成份比较合理,综合性能较好,强度高。
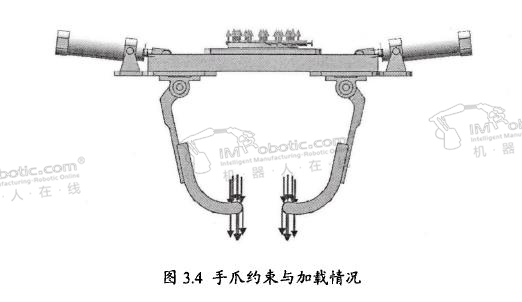
本次分析的静力状态是手爪抓起面粉袋的状况,面粉袋对其压力方向为竖直向下,为保证受力的可靠性,假定面粉袋的重力全部分布在手爪末端的四个辊轴上。25kg的面粉袋重力为245N,所以在每一个辊轴上平均施加约62N的载荷。拾取手爪的边界约束与外部载荷分布情况如图3.4所示。
SolidWorks自带的材料库中包含了各种金属和非金属材料,但由于标准型号不同,本文选择了与硬铝性能相近的2024合金,为分析的简便性考虑,将零件的材料均定义为2024合金,其弹性模量为73GPa,泊松比为0.33,密度为2800kg/m3,屈服强度为75.83MPa,张力强度为186. I 3MPa o
(2)添加边界约束、定义外部载荷
码垛机器人依据实际的工作和安装情况,为拾取手爪添加边界约束和外部载荷。拾取手爪通过其上部安装板上的法兰盘与外部结构相连,相对于整个手爪其是固定的,所以仅需在法兰盘上添加固定约束,其它部件的运动情况己经在模型的装配体中完全定义并直接转移到分析环境中。由于是对装配体的静力学分析,为使结果更接近实际情况,因此需要定义接触面组,分别为气缸与支撑座、推杆与气缸连接件、轴承与轴承座,将他们的接触类型均定义为无穿透型。


好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









