




基于机器视觉的面粉袋码垛机器人研究中手爪模型网格划分
时间:2017-08-09
阅读:8110
原创

码垛机器人通过离散化处理,数学模型分为有限元素,这一过程称为网格划分。离散化在视觉上便是将三维几何模型划分成网格,它是有限元分析中必须处理的步骤,也是极其关键的一步。网格划分的密度直接影响求解结果的准确性和精度,网格单元划分的越细,求解结果越准确,离散误差也越小,但是求解的时间越长,甚至出现求解失败的情况。所以在定义网格大小的时候需要权衡计算精度与运行求解时间的关系,选择合适的网格大小。
网格划分出的单元类型有不同种类,在Simulation中主要包含有四种网格单元类型,分别为一阶、二阶实体四面体单元和一阶、二阶三角形壳单元。模型中的几何体部分采用实体四面体单元划分,而对于模型中的几何面部分则采用三角形壳单元进行划分,利用这种划分模式才能够对几乎任何几何实体或面进行可靠的网格划分。相比于一阶单元的初步分析,二阶单元更多的应用在应力分布集中和精度要求高的部位。
使用Simulation对结构进行线性静力学分析时,软件系统会根据实际绘制的三维模型特点,自动选择相应的单元类型进行网格划分,一般默认设置的网格参数能够保证合理的离散化误差,并且计算时间较短。
本次拾取手爪的结构分析是对整体结构的受力分析,为了得到精确地分析结果,设置了网格密度为高品质,网格为实体网格,标准网格的大小为9.82mm,网格的公差为0.49。由于推杆和夹持手指臂在该状态下受到较大的弯矩,为了获得更精确地分析结果,所以运用网格控制对该区域的网格加密划分,设置单元的大小为4.91 mm。划分的单元总数为47853,节点总数为87616,网格划分后的结果如图3.5所示。

3.3.4求解分析
网格划分完成后,实体三维模型被表示为许多线性代数方程组的型式,由软件的解算器对它们求解计算,这些方程可以求解的两种方法:直接法和迭代法。直接法利用精确数值方法求解方程组。采用迭代法求解方程为近似方法,在每次迭代中,假设一个解和计算错误,继续迭代,直到可以接受的误差。
Simulation静力分析提供了两种解决方法:Direct Sparse解算器和FFFPIus方式。一般而言,当求解问题很大时,FFFPIus方式处理速度很快,并且当问题越大会越有优势。Direct Sparse解算器对于计算机的内存容量使用较多,这也提高了其运行速度。对于说设计的结构使用多种材料的情况并且材料的参数差别较大时,FFFPIus方式求解的精度相对低很多,因此,这种情况应该选用Direct Sparse解算器。
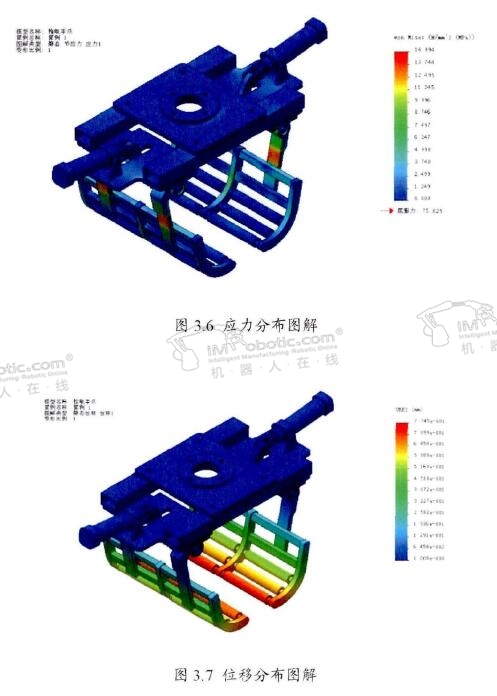
从上面网格的划分情况可以看出,本次分析问题的规模不是太大,而且模型中材料的弹性模量也无差异,为了获得高精度的结算结果,选用直接稀疏矩阵解算器对拾取手爪的整体静力结构进行分析。运行分析模型后,得出手爪的静态应力分布图解、静态位移分布图解、静态应变分布图解和安全系数分布图解,分别如图3.6、图3.7、图3.8和图3.9所示。
.jpg)
.jpg)
码垛机器人由图3.6和图3.8可以看出,手爪所受最大应力为14.99MPa,小于材料的屈服应力75.83MPa,满足强度设计要求,其中应力较大部位主要为夹持架的上部的摆臂、轴承座的底端和旋转轴,并且在上述几处的应变也比较大。由图3.7可以看出,手爪的位移变化最大为7.75 X 10-1mm,出现在手爪末端的辊轴处,这是由于结构整体的变形在手爪末端进一步放大的缘故,相对于整体的结构尺寸,该位移变化在可以接受的范围。由图3.9手爪的安全系数分布图解所示,手爪整体结构中最小的安全系数为5.06,完全满足设计的安全要求,说明机构设计的可靠合理。综合以上四幅静力学分析云图可以得出,拾取手爪的设计满足工作的强度要求,也为拾取手爪的进一步优化设计提供了依据。

码垛机器人
基于机器视觉的面粉袋码垛机器人研究
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









