





喷涂机器人研究基于快速贪婪三角化算法的点云曲面重建
时间:2017-08-17
阅读:13757
原创

3.4.4基于快速贪婪三角化算法的点云曲面重建
喷涂机器人PcL中目前实现了基于点云的曲面重建模块框架,在此基础上实现了比较基础的泊松重建、MC重建、EarClipping等算法。基于前面对点云模型的曲面重建算法的研究,本文针对无序点云以及后续处理的需要采用了贪婪三角化的方法实现了点云数据的快速三角化,重建后得到的模型由一系列三角面片组成。图3-13是使用快速贪婪三角化算法对球面上的部分点云数据精简处理后在不同参数下的曲面重建结果。
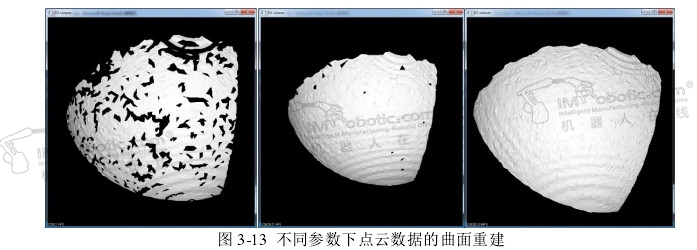
快速贪婪三角化算法主要有三个步骤,首先将有向点云投影到某一局部二维坐标平面内,再在坐标平面内进行平面内的Delaunay三角化,再根据空间内三维点的拓扑连接关系获得一个三角网格曲面模型。在贪婪三角化算法的实现中通过语句SetMaximumNearestNeighbors来设置搜索领域个数、SetMu设置邻近点搜索的最远距离、SetSearchRadius设置三角形的最大边长、SetMinimumAngle和SetMaximumAngle分别设置三角化后每个三角形的最大角和最小角。此外,为了处理边缘或者角很尖锐以及一个表面的两边非常靠近的情况,通过语句SetMaximumSurfaceAgle来判断如果某点法线方向的偏离超过指定角度,该点将被忽略、SetNormalConsistency保证每个点的法线朝向一致。通过修改以上的参数,能够得到不同的曲面重建效果,图3-13中左侧的曲面重建结果有较多的空洞,中间的重建结果好了很多,但仍有少量的空洞,右侧的曲面重建效果最佳。
3.4.5基于特征点粗匹配的改进ICP算法的点云配准
点云配准算法是用来实现多个点云模型之间的注册和拼接,一般在文物保护中应用的比较多。点云库(PCL)中包含了配准相关的基础数据结构与经典配准算法如lCP等,以及配准过程中的对应点估计、错误对应点去除等流程。本文中因为需要求解点云模型在多个坐标系下的变换关系,因而采用了ICP算法来求解坐标系之间的齐次变换参数。lCP算法的一般流程为:原始数据采样、寻找对应点对、筛选对应点集、求解坐标变换。此外,为了提高lCP算法的计算效率,可以对点云数据预先进行粗匹配,通过粗匹配得到初始变换矩阵的估计,再运用lCP算法能够大大提高点云配准的处理速度。
因此,本文提出了基于特征点粗匹配的改进迭代最近点算法,以解决ICP算法处理速度较慢的缺陷,图3-14是基于特征点粗匹配的改进ICP算法流程图,具体改进有如下两点:
1)采用随机采样一致性算法(RANSAC)对点云进行粗配准,缩小平移和旋转错位,并且对点云没有特殊要求,具有广泛的通用性和适用性;
2)对于精确配准,通过计算点云特征提取特征点,然后在特征空间内搜索最近点,再运用ICP算法进行配准,大大提高了算法的处理速度。
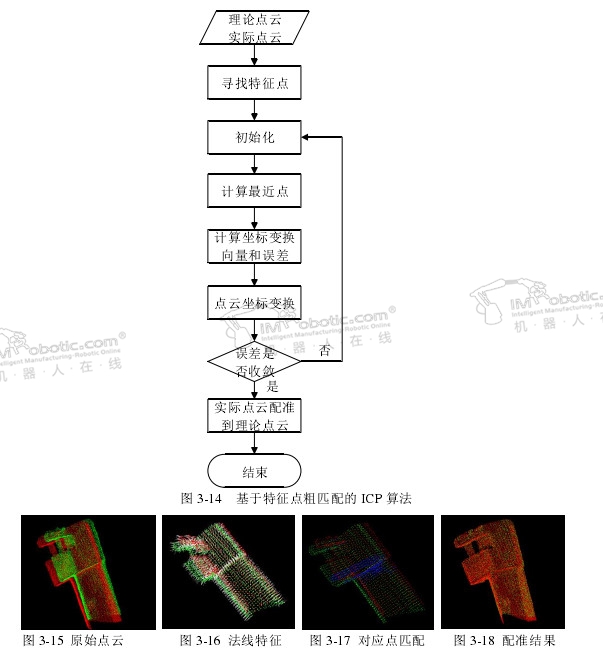
为了验证本文改进ICP算法的准确性,对叶片的点云模型进行了轮廓度检测。叶片完整的理论点云模型有19780个点,扫描得到的点云模型有29221个点。原始点云的可视化和法线提取分别如图3-15和图3-16所示,图3-17是对应点匹配的可视化,配准结果如图3-18所示。最后计算了配准后的对应点对之间的距离,得到的轮廓度误差为1.042_59 mm,表明本文的改进ICP算法能够满足高精度的轮廓度检测要求。关于本部分的研究成果及对于改进ICP算法准确性验证的详细内容见本文在硕士学位期间发表的论文“基于改进ICP算法的面轮廓度检测”。
3.5本章小结
喷涂机器人本章主要介绍了逆向工程技术在本课题中的应用,通过逆向工程技术对物体的三维信息进行数据采集与处理,然后对近几年发展起来的廉价三维测量设备Kinect进行了简介,并对Kinect的标定进行了研究,包括彩色摄像头的标定、红外深度摄像头的标定以及彩色摄像头和红外深度摄像头之间的配准,接着又研究了点云数据的处理方法,主要有点云数据的去噪、平滑、精简、曲面重建以及在后文中求解坐标系之间的齐次变换关系时运用的点云配准技术。

喷涂机器人
基于点云切片技术的喷涂机器人自编程技术研究
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









