





基于点云切片技术的喷涂路径规划
时间:2017-08-17
阅读:8992
原创

第4章基于点云切片技术的喷涂路径规划
4.1引言
喷涂机器人在实际的喷涂作业中,为了达到较好的喷涂效果,同时兼顾喷涂效率,使得喷涂路径规划成为一个非常复杂的问题,因此本章主要研究如何利用点云切片技术对工件点云模型进行喷涂路径规划的问题。首先建立喷涂空间各坐标系,并求解各坐标系之间的变换关系,然后采用点云切片算法实现喷涂路径的规划,最后针对复杂模型喷涂路径规划困难的问题,提出基于曲面分片算法和点云切片技术的喷涂路径规划方法。
4.2基于改进ICP算法的坐标变换求解
4.2.1喷涂空间各坐标系的构建
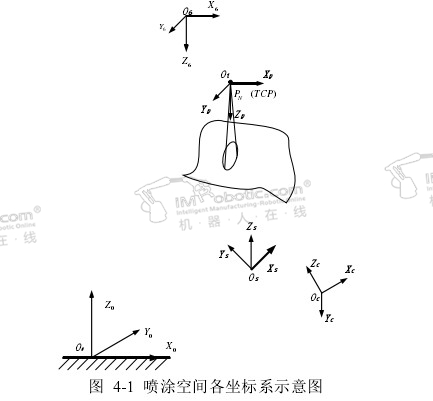
在实际喷涂作业空间中,由于自编程技术涉及到机器人基坐标系、工具坐标系、三维扫描坐标系、Kinect空间坐标系等多个坐标系,要规划喷涂路径点就要知道喷枪在机器人基坐标系下确切的位置和姿态,因此就要知道每个坐标系之间的旋转和平移的关系即求解各坐标系之间的齐次变换矩阵,这使得喷涂空间极为复杂,如图4-1所示是喷涂空间各坐标系的构建。其中:
4.2.2扫描坐标系到Kinect坐标系的坐标变换求解
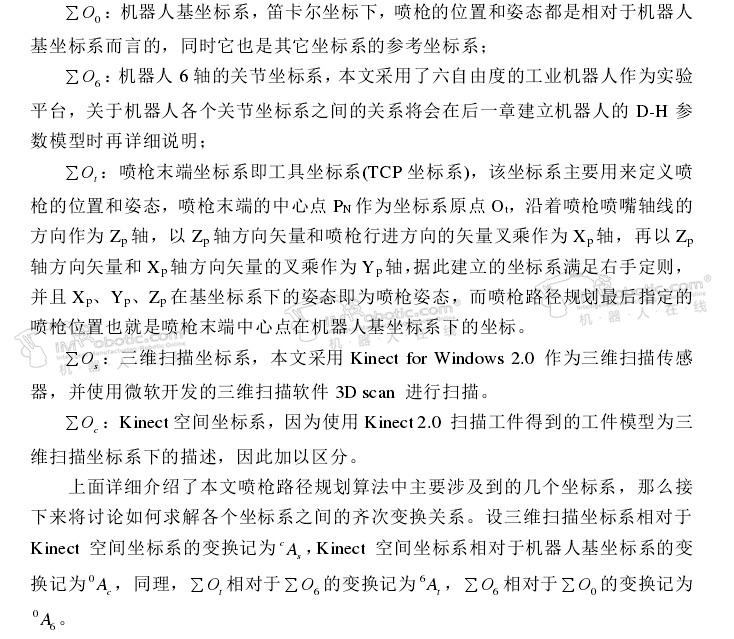
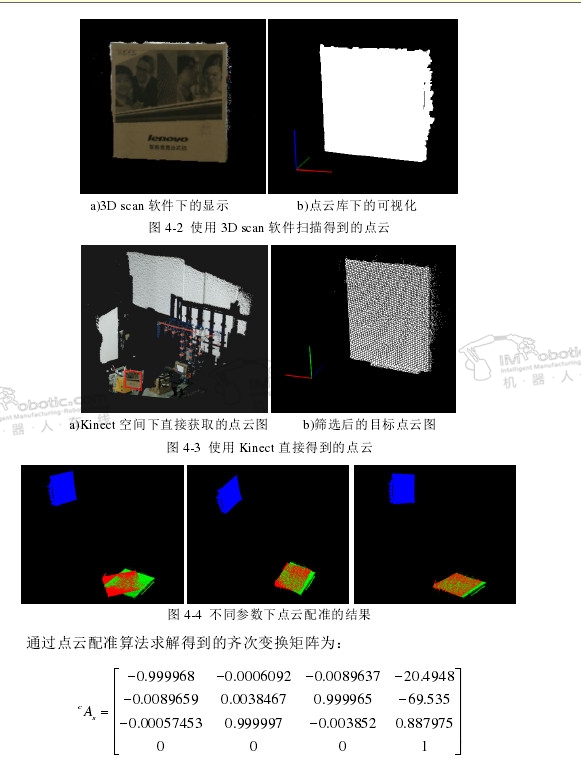
喷涂机器人在3D scan软件下,使用Kinect扫描得到的工件坐标都是在扫描坐标系下的点云,由于3D scan软件是由微软开发的三维扫描软件,其关于扫描坐标系的建立法则我们并不清楚,因此要实现扫描坐标系下的工件点云到基坐标系下的变换,就不得不通过一个和扫描坐标系存在联系并且己知的中间坐标系来实现,这里就引入了Kinect的空间坐标系。使用Kinect直接获取场景空间的三维点云就是在Kinect的空间坐标系下的坐标,当我们分别获取同一场景在扫描坐标系下和Kinect空间坐标系下的点云后,就可以利用点云配准的方法来求解扫描坐标系到kinect空间坐标系的旋转变换和平移变换,图4-2是通过3D scan软件使用Kinect得到的某一场景下的点云图,图4-3是使用Kinect直接获取同一场景下的点云图,图4-4是不同参数下采用点云配准算法得到的配准结果,其中蓝色部分是物体在扫描坐标系下的点云,绿色部分是物体在Kinect坐标系下的点云,红色部分是扫描坐标系下的点云通过点云配准得到的变换矩阵变换到Kinect坐标系下的点云。

喷涂机器人
基于点云切片技术的喷涂机器人自编程技术研究
技术干货

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









