





基于点云切片技术的喷涂机器人路径规划
时间:2017-08-17
阅读:12701

4.3.1基于点云切片技术的简单曲面路径规划
对于由平面、规则曲面或曲率变化不大的曲面构成的工件点云模型,本文统称为简单曲面,这类点云模型的拓扑结构比较简单,规则的曲面或平面的点云分布也呈现一定的规律,喷涂机器人路径的规划也比较容易实现,因此可以直接采用点云切片算法进行路径规划。具体的过程就是利用点云切片技术,根据喷涂机器人喷枪移动方向来设定点云切片方向,切片层数的设置则取决于喷涂路径的往返次数,通过一系列平行平面去切工件点云模型,然后对工件点云数据在每个切片两侧附近的临近点进行匹配,得到匹配点之间与切片的交点,再利用点云数据的法向量估计对喷涂轨迹点进行法向量的估算,最后将喷涂机器人喷枪轨迹点沿着法向量偏移一个喷枪高度的距离,依次首尾连接偏移后的路径点从而获取喷涂机器人路径。
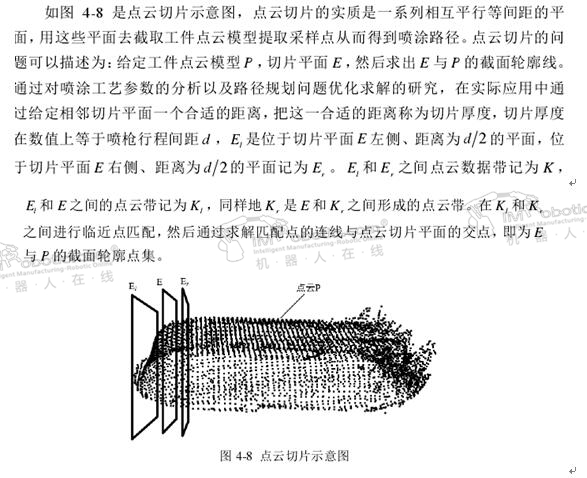
(1)点云切片方向的设定由于本文采用的是光栅式的路径形式,喷涂机器人轨迹是一组相互平行且等间距的路径,因此,本文所采用的点云切片平面是沿着切片方向分布均匀的一系列平行平面。为了获得较好的喷涂效果,应该使喷枪往返次数尽量少,这样喷枪就应该沿着工件点云数据分量最大的方向移动,因此可以确定点云切片的方向垂直于工件点云数据分布跨度最大的方向,并且与喷涂路径也是相互垂直的。
为了简化点云切片位置的选取,通常选择工件点云数据在三个坐标轴上分量最大的某一轴向作为点云切片的方向,如果用户使用的点云切片方向不平行于轴向,不仅会使点云切片平面的方程变得复杂,计算麻烦,导致算法效率较低,有效的解决办法是通过坐标变换将工件点云模型摆正。
(3)喷涂路径点的计算本文运用求交法来计算喷涂机器人路径点,由于求交法简单、容易实现而被广泛采用,求交法又被称为相邻数据点插值法,和平面与模型相交求交线的原理相似,喷涂路径点的计算以点云切片两侧最近点匹配的工件点云的连线与切片平面的交点来近似表达切片与模型相交的局部轮廓。
.jpg)
在计算喷涂路径点时,求交法需要进行大量的点云临近点的距离计算和点云插值计算,当工件点云数据量非常庞大时,求交法涉及到的计算量就更大,因此为了提高喷涂点计算的效率,在实际应用中一般通过限定临近点搜索半径的方法来减少计算量,图4-9为点云切片平面与工件点云求交示意图,算法具体过程描述如下:
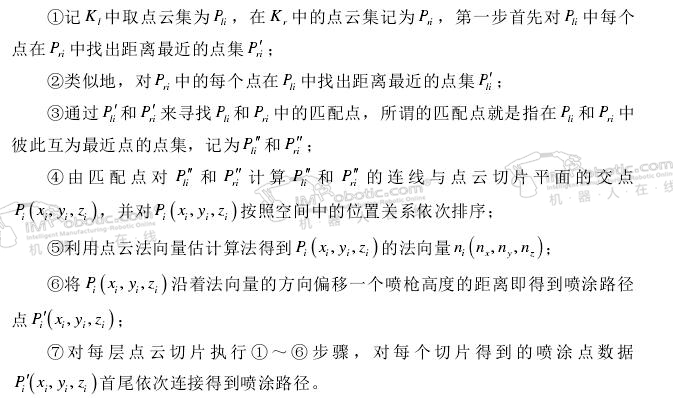
图4-10是对不完整的球面点云模型直接采用点云切片技术进行喷涂机器人路径规划得到的结果,其中白色的球面是对点云数据重建得到的曲面,红色的曲线是利用路径规划算法得到的喷涂路径。

喷涂机器人
基于点云切片技术的喷涂机器人自编程技术研究
技术干货

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









