





基于云切片技术的喷涂机器人曲面分片算法
时间:2017-08-17
阅读:7915

4.3.2基于曲面分片算法和点云切片技术的复杂曲面路径规划
对于模型比较简单的工件,直接采用点云切片技术可以快速解决喷涂机器人路径规划问题,而且可以获得较好的喷涂效果,但对于由自由曲面或复杂曲面等构成的曲率变化较大的复杂曲面模型来说,直接使用点云切片技术获得的喷涂机器人路径,其喷涂效果较差。因此,针对复杂曲面,本文拟采用曲面分片的方法解决复杂曲面路径规则困难的问题。
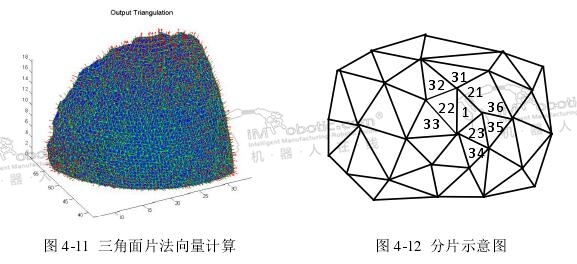
本文对点云数据采用贪婪三角化算法进行曲面重建,重建得到的曲面是由一系列的三角化平面构成的,称之为三角化曲面。在对三角化曲面进行分片前,首先要计算每个三角片的法向量,如图4-11所示是对每个三角化平面法向量的可视化。
一般认为,在喷涂机器人作业过程中一个喷枪喷炬的范围内,如果喷枪喷射方向与三角面片法向量夹角在设定的允许范围内,可以近似认为该面片与喷枪喷射方向垂直,则可以运用前面的喷涂模型对喷涂机器人路径进行优化,使得面片上的涂层厚度分布满足均匀性要求,因此,可以通过最大允许涂层厚度偏差来设定喷枪喷射方向与三角面片法向量的偏角临界值 ,利用分片算法将三角化曲面分解成多个较大的面片,且每个较大的面片可以近似看作一个平面,然后再利用点云切片技术对其进行喷涂机器人路径规划。对三角化曲面进行分片的过程的示意图如图4-12所示。
,利用分片算法将三角化曲面分解成多个较大的面片,且每个较大的面片可以近似看作一个平面,然后再利用点云切片技术对其进行喷涂机器人路径规划。对三角化曲面进行分片的过程的示意图如图4-12所示。
本文采用的分片算法具体流程如下:
① 算法随机分配一个初始的三角面片;
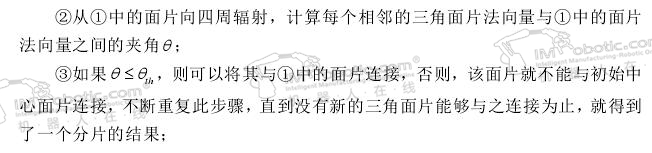
④选择剩下的没有连接的面片作为①中的三角面片,重复①②③步骤,直到每个面片都连接成分片为止。

喷涂机器人
基于点云切片技术的喷涂机器人自编程技术研究
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









