




面向超大船体外表面的喷涂机器人研究中机械臂关节结构设计
时间:2017-08-22
阅读:9363
原创

2.5机械臂关节结构设计
喷涂机器人机械臂关节的设计是机械臂结构设计的关键,起到各连杆之间连接与驱动的作用,关节性能的好坏直接影响整个机械臂的性能,要设计的机械臂整体外形如图2-12所示,从图中可以看出整个机械臂主要由安装底座、腰关节部件、肩关节部件、大臂、肘关节部件、小臂、腕部关节部件等组成。腕部根据接口要求设计腕部法兰,直接安装喷涂工具,对船体外表面进行喷涂。

2.5.1各关节机械结构
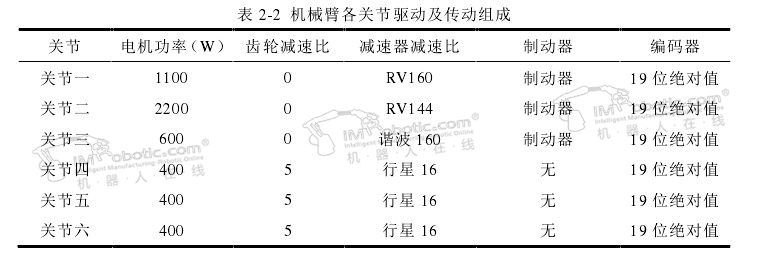
喷涂机器人机械臂各关节采用高性能交流伺服系统驱动,配置集成制动器,这种驱动系统具有精度高、低频特性好、加减速快等特点,可以满足机械臂各关节速度和位置的精度要求。同时为了降低机械臂本体重量和保证要求的运动精度,减速系统采用RV减速器、谐波减速器和行星减速器并用的方式,使机械臂传动系统结构紧凑,重量得到有效的控制,产品化的减速器的齿轮回差小,可以将其对机械臂运动精度的影响降低到最小。各关节详细传动部件的选择如表2-2所示。
机械臂的前三关节采用电机、编码器、制动器、减速器的同轴式配置方式,这种配置方式结构简单紧凑。腰转关节与肩关节需要承受机械臂上部所有自身重量与负载重量,所需刚性要求较大,故减速系统采用RV减速器,伺服电机通过RV减速器的输入花键轴与减速器减速齿轮配合,实现驱动输入,经过减速器的二级传动后的输出作为机械臂上部的驱动,RV减速器具有刚性好、减速比大、结构紧凑等优点。肘关节只需要承受小臂与负载的重量,刚度要求小;肘关节减速系统采用谐波减速器,谐波减速器质量比RV减速器轻,减速比更大,可减小机械臂重量,但刚性相对较差,由于肘关节处负载减小,所需刚度减小,采用谐波减速器可以满足机械臂的负载需求。
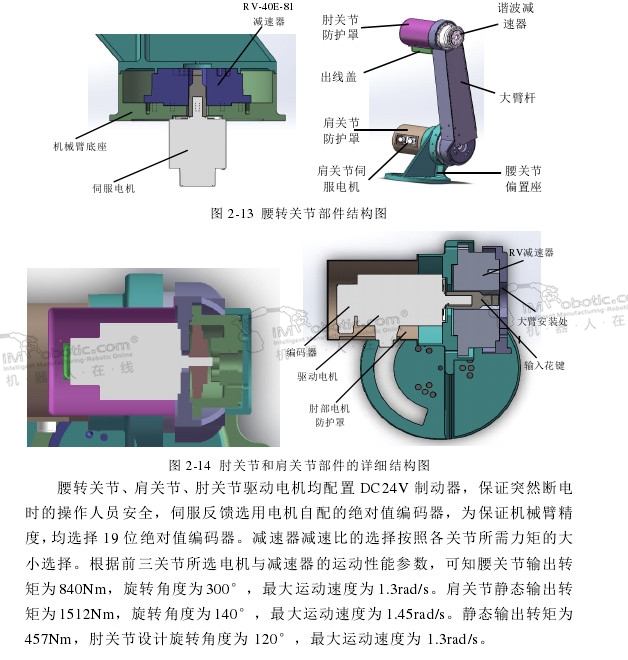
机械臂的前三关节在机械臂突然断电时,受自身重量的影响,可能会导致机械臂各连杆的坍塌,造成人员伤害,因此前三关节电机需要带制动器,以保证突然断电时,机械臂可以保持当前姿态不变。腰转关节、肩关节和肘关节的传动结构设计分别如图2-13和图2-14所示

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









