




面向超大船体外表面的喷涂机械臂研究中小臂和手腕关节部件结构设计
时间:2017-08-22
阅读:9510
原创

2.5.2小臂和手腕关节部件结构设计
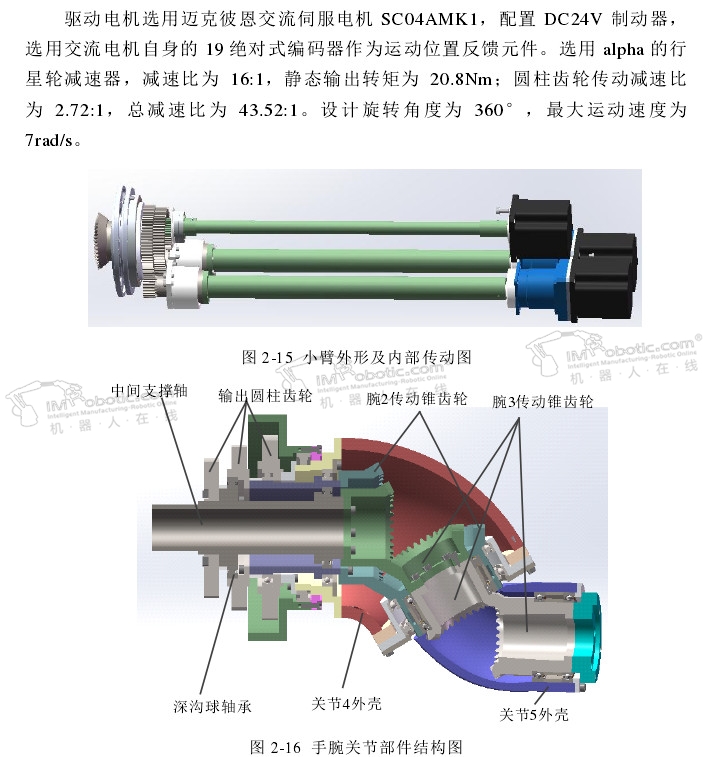
喷涂机器人手腕的整个结构采用三轴传动的布置形式,手腕三关节的电机集中于肘关节处,大大减少了肘关节和肩关节的负载,并使肘关节结构更加紧凑。手腕的关节4与关节_5电机经过行星齿轮减速后,通过圆柱齿轮传动到手腕,再经锥齿轮传动到输出轴端,实现关节4和关节_5的转动。图2-1_5给出了小臂内部传动图和图2-16给出了手腕关节部件结构图。
2.6机械臂连接结构及防爆结构的设计
为保证轻量化喷涂机械臂与液压展臂的良好结合,针对液压展臂原有的载重平台,在原有的载重平台上进行改装,原有载重平台连接如图2-17所示,设计轻量化喷涂机械臂与液压展臂的专用接口模块,包括机械臂安装座、变压器安装柜、控制电器柜支撑。

机械臂末端接口模块为机械臂的机械臂本体与控制系统硬件提供了安装接口,如图2-18所示,避免了编码器信号在远距离传输时的干扰,从而间接地提高了机械臂的控制精度。
受喷涂工作环境的限制,机械臂在喷涂过程中,会产生大量易燃易爆气体,这就对机械臂的防护性能提出更高的要求,需要对各关节的电气部分进行防爆处理。这里采用正压防爆的方式对机械臂各关节进行防护,为此在各电机的连接处设计正压防爆防护罩,如图2-19所示。
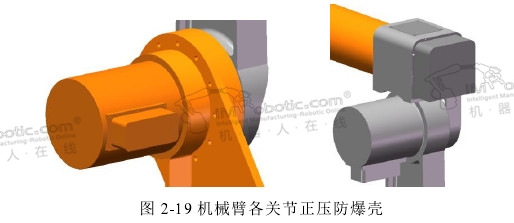
喷涂机器人当电机工作时,对防爆壳内充压力为1Mpa的干净空气,通过保持电机腔室内的气压,使得保护壳内的气压一直高于外界气压,防止外界易燃易爆气体的进入,从而达到防爆的目的。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









