





面向超大船体外表面的喷涂机械臂研究中机械臂强度校核
时间:2017-08-22
阅读:11882
原创

2.7机械臂强度校核
2.7.1机械臂连杆强度校核
喷涂机器人依靠各种连杆完成各关节之间的连接,各连杆不仅直接影响机械臂的工作空间,而且在机械臂工作过程中将各关节的力矩传递到机械臂末端,与此同时连接杆件的强度能够满足上层关节与连杆的自重与负载的要求。此外,各关节连杆的设计需要在满足工艺要求的前提下,尽量保证机械臂美观,机械臂各连杆如图2-20所示。
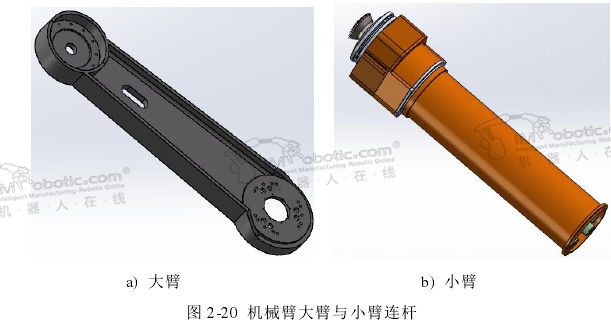
机械臂的连杆主要为大臂与小臂,机械臂的大臂承受几乎整个机械臂的自重与末端负载的重量,小臂需要承受自身重量与末端负载。机械臂的连杆在受力作用下的变形,直接影响机械臂的精度性能,连杆的所受应力情况,直接关系到机械臂的工作安全性。
2.7.2机械臂关节连接件强度校核
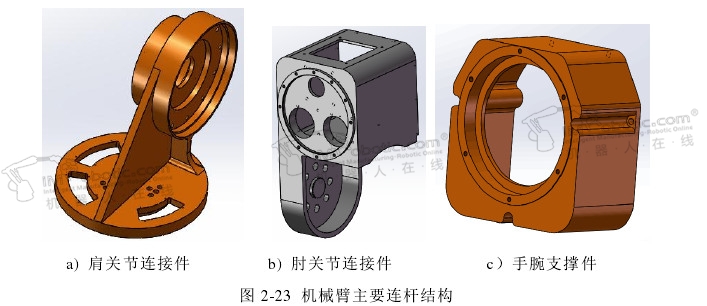
关节连接件的作用是连接关节与连杆,机械臂连杆上的作用力最终都需要有关节连接件来承受,各关节的驱动力也由关节连接件直接输出。同样考虑到机械臂的精度与刚度要求,对肩关节连接件、肘关节连接件和手腕支撑件进行强度校核。根据强度校核结果,从加工工艺、外观美观、变形大小等方面对连接件结构进行优化,设计完成后的关节连接件如图2-23所示。
以同样的步骤对机械臂各关节连接处的零件进行静力学强度分析,由于零件结构简单且仅对单个零部件进行校核,Solidworks/simulation模块提供了简单有效的静力学仿真功能。在进行强度分析之前,应该设定零件的材料与固定端夹具位置,然后设定外部载荷与网格划分方式,通过仿真便可得到各关节连接件的变形量情况,如图2-24所示。
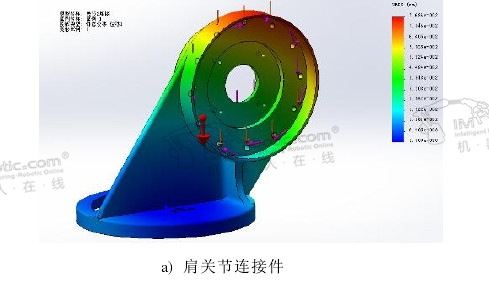
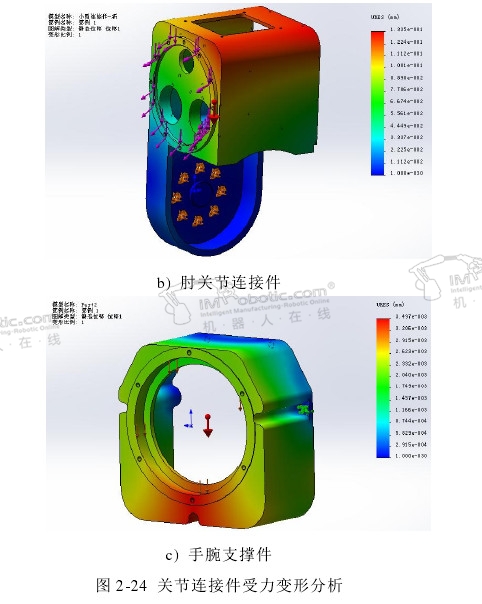
根据分析结果可知,肩关节的最大变形量为0.07mm,肘关节的最大变形量为0.01mm,腕部支撑件的最大变形量为0.003mm。以关节连接零部件的校核结果为参考,不断优化零件结构,最终使各零件的受力变形小于0.1mm,满足机械臂的精度要求。
2.8本章小结
是直接关系到,喷涂机器人的结构设计是整个机器人系统的基础与保障。本章结合液压展臂的负载能力、喷涂效率的要求以及喷涂机械臂的负载能力、工作空间、定位精度等性能要求,对机械臂进行了结构与驱动系统的设计,设计了一种负载自重比大,精度高,工作空间大,灵活性好的新型喷涂机械臂。机械臂的前三个关节采用伺服电机、编码器、制动器、减速器同轴式关节配置方式,使关节结构紧凑,重量轻。后三个关节的电机集中于肘关节处,经过三个齿轮轴的传动到达腕部,由于手腕关节的运动范围小、自身负载轻,无需采用断电制动保护措施,与此同时针对设计的机械臂连杆与关节连接件进行静力学强度校核,使其刚度与结构强度满足机械臂运动的要求。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









