





面向超大船体外表面的喷涂机械臂研究中喷涂机械臂运动学分析及动力学仿真
时间:2017-08-23
阅读:6681
原创

第3章喷涂机械臂运动学分析及动力学仿真
3.1引言
喷涂机器人在进行机械臂运动学时,只需考虑机械臂末端的运动特性与各关节之间的关系,而不考虑机械臂产生运动时各关节所需要施加的力。本章运用D-H参数法求解机械臂的正运动学,采用遍历迭代法求解机械臂的逆运动学,从而获得机械臂末端位置和姿态与各关节角度之间的关系;建立机械臂的雅克比矩阵,来计算机械臂末端的速度和加速度与各关节转动速度和加速度的关系。此外,为保证机械臂的作业空间需要和运动灵活性,利用Matlab软件对机械臂的工作空间进行解算分析。
为了保证机械臂在极限运动状态下,各关节能提供足够的驱动力,运用ADAMS软件对机械臂进行了在极限状态下的动力学仿真,保证机械臂运动的可靠性。
3.2船体外表面喷涂机械臂运动学分析
基于D-H参数法,对所研制的喷涂机械臂进行正运动学分析与解算,针对所设计喷涂机械臂手腕存在诱导运动的特点,采用遍历迭代法对机械臂的逆运动学进行求解。
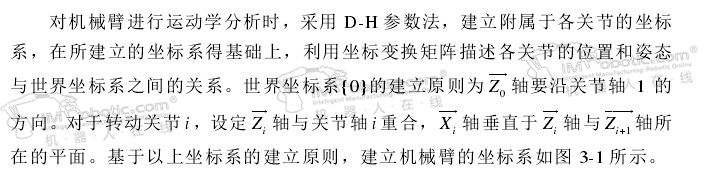
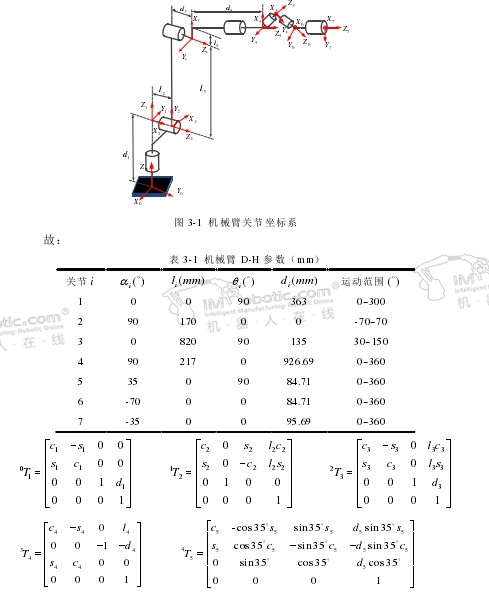
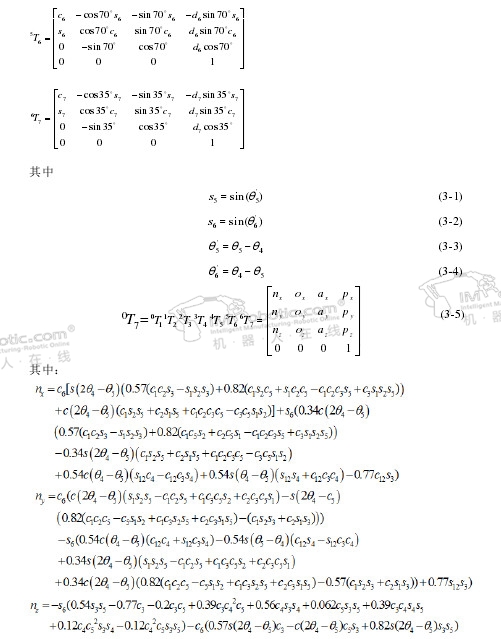
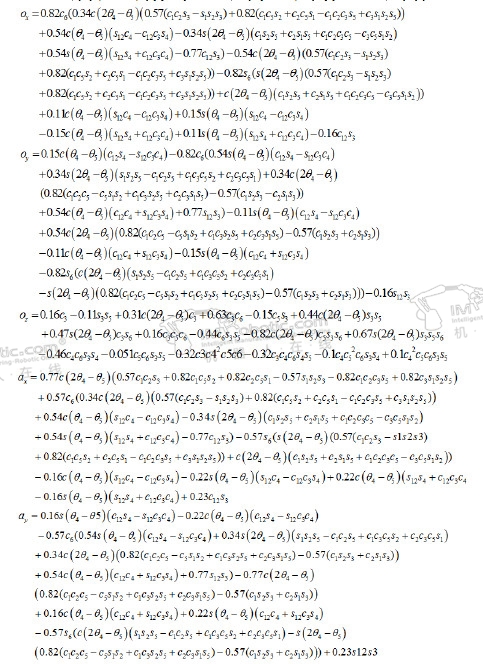
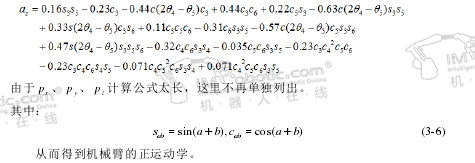
3.2.1 D-H正运动学求解
3.2.2基于遍历迭代法的逆运动学求解
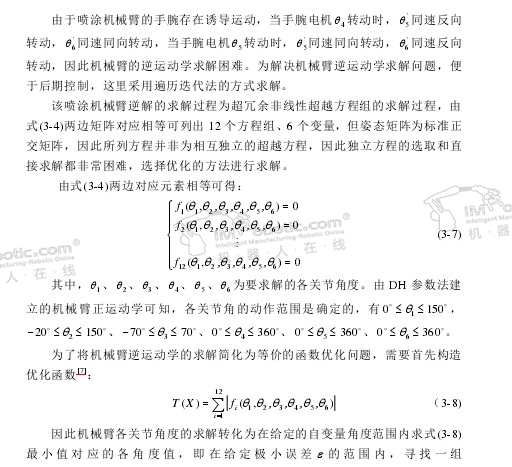
针对上述提出的目标优化函数,采用遍历迭代的求解算法,对机械臂的逆
运动学进行求解,遍历迭代算法的流程图如图3-2所示。
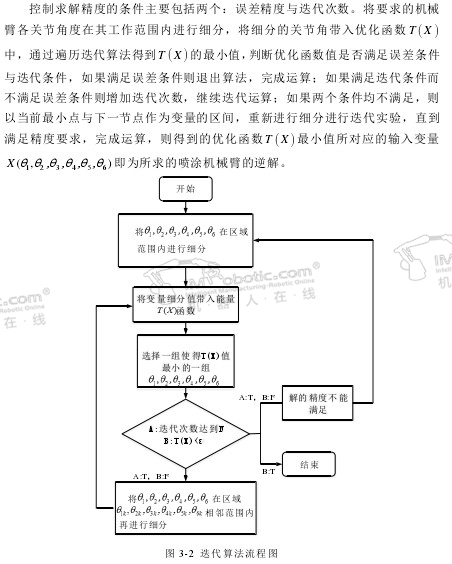
3.2.3机械臂运动学验证
根据计算上面得到的机械臂正逆解,利用Matlab对机械臂的各关节角度进行正逆解运算,首先给定各关节角的角度值,通过上面解得的机械臂正运动学得到机械臂末端的位置姿态矩阵,然后根据所得到的机械臂末端的位置姿态矩阵,通过计算所得的机械臂逆运动学得到各关节角度值,对比得到的各关节角度与给定的关节角度之间的偏差验证可得机械臂运动学是正确的。
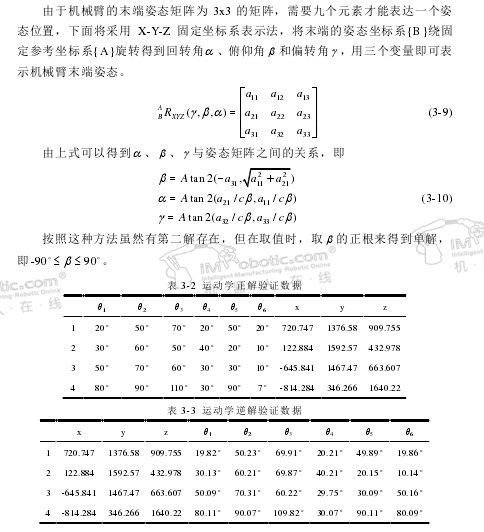
喷涂机器人对比表3-2与3-3可知,基于D-H参数的机械臂正运动学与基于遍历迭代法的逆运动学是正确的。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-19 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19 -
自主装卸机器人原理与应用
关键字: 赛那德 自主装卸机器人 2024-06-17 -
工业用急停开关什么牌子好,优势有哪些?
关键字: 急停开关 品牌 优势 2024-06-13 -
工业机器人的急停装置装在什么位置?如何启动?
关键字: 急停开关 安装位置 如何启动 2024-06-11
-
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03 -
安川机器人驱动器如何设置参数?
标签: 安川机器人,驱动器,设置参数 提问:先知 2024-06-13 10:15:03 -
IDEC/和泉安全开关怎么样?
标签: IDEC,和泉,安全开关 提问:极客 2024-06-11 13:41:07 -
安川机器人原点丢了如何恢复
标签: 安川机器人,原点恢复 提问:泡奶 2024-06-05 13:18:02

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-19
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04
- 2024-05-31
- 2024-05-29
- 2024-05-27









