





面向超大船体外表面的喷涂机械臂研究中机械臂工作空间分析
时间:2017-08-23
阅读:8261
原创

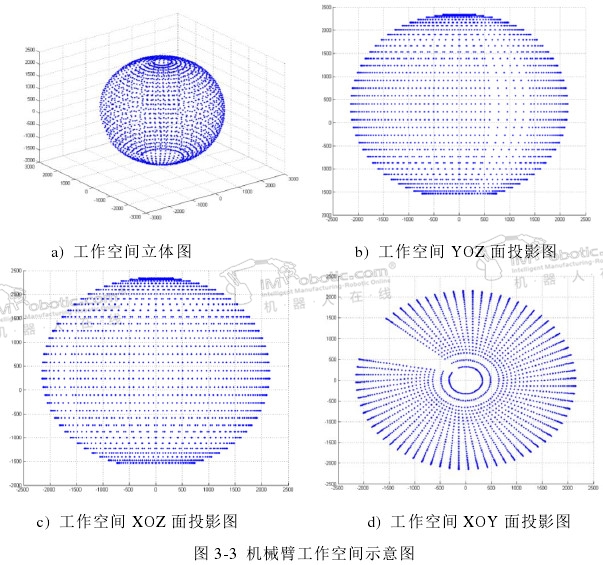
3.3机械臂工作空间分析
喷涂机器人工作空间的大小影响其工作范围与工作效率,按照己经得到的机械臂正运动学,利用M atlab软件绘制机械臂的运动空间,对比得到的工作空间与设计指标的大小,便可验证所设计的机械臂是否满足工作范围的要求。机械臂工作空间主要受各连杆的长度与各关节转动角度范围影响,而关节角度对工作空间的贡献由前三个关节运动范围决定,后三个关节主要决定位置姿态,在进行工作空间绘制时,设定腰转关节、肩关节、肘关节的运动范围分别为,给手腕的关节4、关节_5、关节6固定角度值,从而得到机械臂的工作空间。
利用M atlab解算的机械臂工作空间如图3 -3所示,可知机械臂的工作半径为2.2 m。
3.4机械臂雅克比矩阵
为了控制机械臂末端的速度与加速度,需要建立各关节的速度与机械臂末端的关系。通过用机械臂的雅克比矩阵来描述两者之间的关系,因此关节角速度与末端操作器速度及其姿态变化可用雅克比矩阵J(q)来表示。
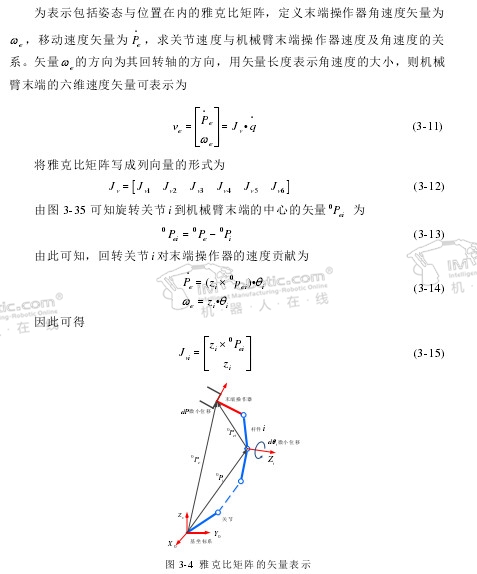
根据式(3-15)与机械臂的正运动可得机械臂雅克比矩阵,由于机械臂鱿正运动学求解公式的庞杂,具体结果这里不再列出。机械臂雅克比矩阵的表示形式为
喷涂机器人处于奇异位置会使雅克比矩阵的值为零,我们可通过雅克比矩阵的值判断机械臂是否处于奇异位置。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11









