




面向超大船体外表面的喷涂机械臂研究中机械臂重复定位精度测量
时间:2017-08-23
阅读:8673
原创

喷涂机器人将激光跟踪仪的靶镜固定到机械臂末端喷枪上,以20mm/s的速度控制机械臂反复到达同一个目标点,测量反复到达该点的实际位置坐标。下面测量机械臂末端反复到达两个点,每个点测量10组数据,测量数据点坐标如表5-2和5-3所示。
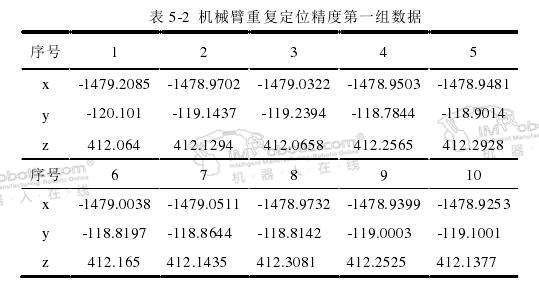
喷涂机器人的重复定位精度是机械臂反复到达固定点的准确程度。为了获得机械臂的重复精度,选取测量得到的一组数据点中间距最大的两点,经过这两点且包含所有测量点的最小球体的半径就是机械臂的重复定位精度。按照上述方法对机械臂末端的测量数据进行处理,得到第一组数据的最小包络球面半径为±0.25mm,第二组数据的最小包络球面半径为±0.208mm,取球面半径最大值作为机械臂最后重复定位精度,因此可以确定所研制的喷涂机械臂的重复定位精度为±0.25mm。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









