




面向超大船体外表面的喷涂机械臂研究中机械臂绝对定位精度测量
时间:2017-08-23
阅读:9280
原创

5.5.2.3机械臂绝对定位精度测量
喷涂机器人的末端定位精度是给定机械臂末端位置与实际位置之间的误差,测量时将靶镜固定到机械臂末端,用激光跟踪仪标定机械臂世界坐标系的位置,然后给定六组机械臂各关节角度,利用己求得的正运动学解算出机械臂末端位置,即为机械臂末端理论位置。给定各关节角度值,让机械臂末端以20mm/s移动到指定位置后,用激光跟踪仪标定机械臂末端位置,即为实际位置。测量结果如表5-4所示。
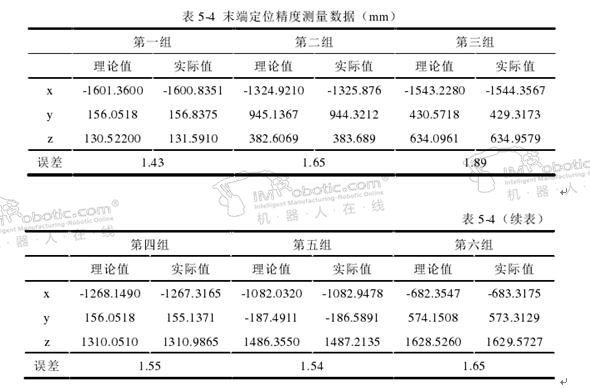
对测得的位置与理论位置进行数据分析,得到两者之间的误差,取各组数据误差的平均值作为机械臂的定位精度,可得机械臂的定位精度为±1.6mm。
5.5.3机械臂系统喷涂实验
将研制的轻量化喷涂机械臂安装于改造完成的液压展臂上,并为其配置相应的控制系统,完成整个超大船体自动喷涂装备,如图5-12所示。

整个喷涂装备由液压展臂与轻量化喷涂机械手组成,喷涂装备初始高度为1.9 m,初始长度为_5 m,液压展臂靠本身自带电池提供原始动力,轻量化机械臂依靠220V交流电供电。
5.4.3.1分段船体模拟体平台搭建
为实现船体模拟喷涂的示范,按照船体某一类分段设计模拟体,如图5-13所示。

喷涂机器人整个模拟船体骨架依靠模块化的析架,便于运输、拆卸和储存,在骨架外部覆盖帆布作为分段船体外表面,为保证分段船体模拟体与实际船体的相似性,定做四段弧形析架作为曲面的支撑,为后面的模拟实验奠定了硬件基础。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









