




基于ROS的码垛机器人运动仿真及轨迹规划中Move_group节点系统框架

3.3.1 Move_group节点系统框架
MoveIt!主节点move_group的高层体系结构如图3-10所示。这个节点作为一个集成:把所有的独立组件联系在一起,为使用者提供一些列的ROS活动和服务。该节点将用户操作接口界面、机器人控制器接口、ROS系统仿真平台、以及码垛机器人位姿状态信息联系在一起。
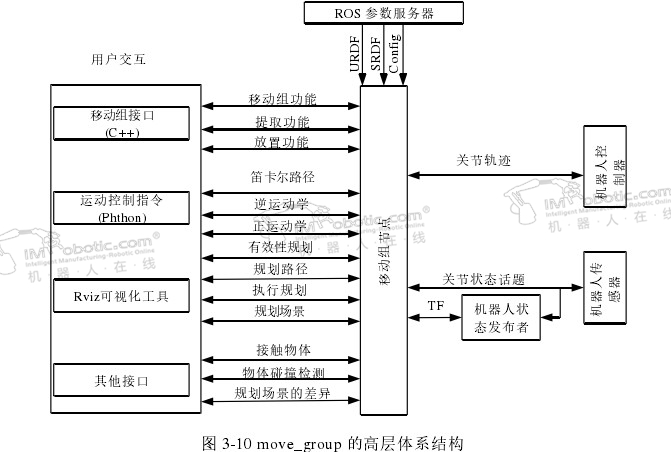
通过用户接口(User Interface),用户可以使用一下三种方三种方式访问ROS的活动和服务:使用C++语言,通过移动组接口(move_group_ interface),并且它提供了一个便于设置的界面;使用Python语言,通过moveit_commander命令程序,控制移动组的运动;通过RViz可视化工具以及运动规划插件完成机器人位姿信息传递。
在ROS参数服务器方面,可以对用户建立的机器人模型进行解析,以获取机器人的参数信息,它可以通过以下三种方式获取信息:通过URDF文件,move_group通过调用ROS参数服务器上的robot_ description函数来获取机器人在URDF文件中的参数信息;通过SRDF文件,该文件通常由MoveIt!设置助手载入URDF文件生成,move_group通过调用ROS参数服务器上robot description_semantic函数,获取SRDF文件中的参数信息;通过MoveIt!配置文件,move_group将寻找ROS服务器上关于MoveIt!的特定配置参数,包括关节限制,运动学,运动规划,感知等信息,移动组的配置文件一般由MoveIt!设置助手自动生成并存储在相应MoveIt!的config目录下。
在机器人接口方面,move_group通过ROS主题和活动与机器人通讯,获得机器人当前的状态信息(关节的角度、速度等),从传感器获传感器数据以及通过Fo1lowJointTrajectoryAction接口与机器人控制器进行通讯。机器人控制器接口是通过与move_group通讯。码垛机器人的位姿状态信息以及位姿转换信息分别通过joint_states主题和ROS TF库获得;move_group节点通过订阅joint_states主题确定当前关节的状态信息,通过运行robot_ state_publisher节点和ROS TF库实现机器人位置姿态矩阵信息转换。
此外,move_group还可以使用规划场景服务来建立仿真场景,以及实现一些拓展功能,例如拾取与放置,运动学,运动规划等功能。


好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









